 2020-04-07
2020-04-07 222
222ИССЛЕДОВАЯИЕ САУ СКОРОСТЬЮ ДВИГАТЕЛЯ, СИНТЕЗИРОВАННОЙ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ ОПТИМИЗАЦИИ КОНТУРОВ
4.I. Цель работы
Изучение метода последовательной оптимизации контуров.
4.2. Последовательность синтеза САУ методом
последовательной оптимизации контуров
| ЗИ |
| Wpc |
|
| Wpт |
|
|
| КТ |

|

|
|
| ЗИ |
| Wpc |
|
|
| Wpт |
|
|
|
|
| КТ |
|
|
|

|
(4.1)
Сущность метода синтеза заключается в том, что вначале синтезируется контур тока, а затем контур скорости. Причём оба контура синтезируются из условия максимального быстродействия, что позволяет более качественно отработать закон изменения задающего воздействия Uз.
|
|
|
|
| Wpт |
|
|
| КТ |
(4.2)
Здесь Uзт – направление задания тока. I – ток электродвигателя.
Приняв передаточную функцию регулятора тока:
 (4.1)
(4.1)
Из рисунка (4.2) можно записать:
 (4.2)
(4.2)
Из (4.2) следует, что передаточная функция контура тока имеет вид:
 (4.3)
(4.3)
Целью синтеза контура тока является определение постоянной времени αТ пропорционально-интегрального регулятора тока. Характеристическое уравнение контура тока имеет вид:

Примем корим характеристического уравнения, соответствующие техническому оптимуму:
Согласно теореме Виетта характеристическое уравнение можно представить:
 (4.4)
(4.4)
Приравняв коэффициенты при одинаковых степенях равенства (4.4) получим:
Таким образом
 (4.5)
(4.5)
С учетом (4.5) передаточная функция контура тока имеет вид:
 (4.6)
(4.6)
Структурная схема контура регулирования скорости с учетом (4.6) представлена на рис. 4.3.
Из рис. 4.3 можно записать:
 (4.7)
(4.7)
Из 4.7 следует, что передаточная функция контура регулирования э. д. с. (скорости) двигателя будет иметь вид:
 (4.8)
(4.8)
Целью синтеза контура скорости является определение параметров пропорционально-интегрального регулятора скорости Т1 и Т2 .

|

|
|

|
|
|
| ɣ |
Рис. 4.3
Зададимся корнями характеристического уравнения передаточной функции (4.8)  (4.9)
(4.9)
Согласно теореме Виетта с учетом (4.8) и (4.9) можно записать равенство:
 (4.10)
(4.10)
Вводя обозначения:
 (4.11)
(4.11)
И приравнивая коэффициенты при одинаковых степенях равенства (4.10) получим:
 (4.12)
(4.12)
 (4.13)
(4.13)
 (4.14)
(4.14)
 (4.15)
(4.15)
Из (4.12) и (4.13) следует:
 (4.16)
(4.16)
Из (4.14) и (4.15) можно определить Т1 и Т2.
 (4.17)
(4.17)
Корни характеристического уравнения контура регулирования скорости будут иметь вид:

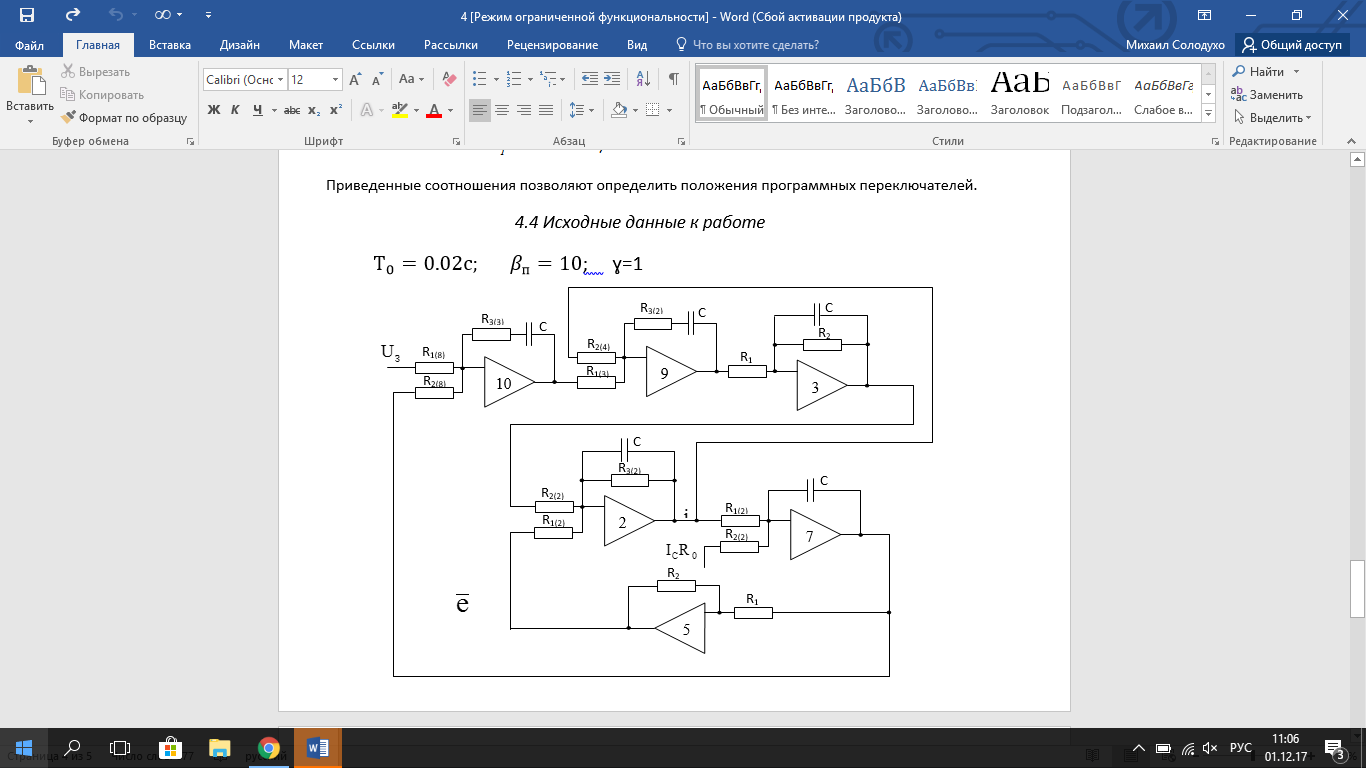
4.3 Схема модулирования САУ
Схема модулирования представлена на рисунке 4.4
Здесь:
 ;
;  ;
;  ;
;  ;
;  =1;
=1;  ;
;
 ;
;  ;
;  ;
;
Приведенные соотношения позволяют определить положения программных переключателей.
4.4 Исходные данные к работе
 ; ɣ=1
; ɣ=1
| Вариант | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |

| 0,02 | 0,04 | 0,08 | 0,12 | 0,15 | 0,02 | 0,04 | 0,08 | 0,12 | 0,04 | 0,08 | 0,12 |

| 0,05 | 0,06 | 0,08 | 0,2 | 0,25 | 0,06 | 0,15 | 0,06 | 0,12 | 0,05 | 0,06 | 0,06 |

| 0,5 | 0,5 | 0,5 | 1 | 1 | 1 | 0,25 | 0,5 | 0,5 | 1 | 1 | 0,5 |
4.4 Порядок выполнения работы
1. В соответствии с исходными данными табл. 4.1 необходимо
рассчитать параметры регулятора скорости и тока.
2. Вычертить схемы моделировании САУ и указать положение
программных переключателей.
3. Снять осциллограммы переходных процессов для скорости и
тока электродвигателя по возмущающему воздействию и задающему
без задатчика интенсивности.
4. Снять осциллограммы переходных процессов для скорости и
тока электродвигателя по задающему воздействию с задатчиком интенсивности (два значения времени пуска двигателя  задаются
задаются
преподавателем).
5. Снять осциллограммы переходных процессов без обратнойсвязи по току.4.6. Содержание отчёта 1. Название и цель работы. 2. Структурная схема САУ и расчёт параметров регулятора токаи регулятора скорости. 3. Схемы моделирования САУ с аадатчиком интенсивности и беззадатчика. 4: Построить осциллограммы переходных процессов по задающему и возмущающему воздействию.4.7. Контрольные вопросы 1. Как рассчитать контур регулирования тока? 2. Как рассчитать контур регулирования скорости? 3. Как рассчитать переходные процессы для тока и скоростипри наличии задатчика интенсивности? 4. Назначение задатчика интенсивности. 5. Уметь пояснить графини переходных процессов для тока искорости электродвигателя по задавшему и возмущающему воздействию.








