 2020-04-07
2020-04-07 175
175ИССЛЕДОВАНИЕ НАБЛЮДАТЕЛЯ ДЛЯ ИЗМЕРЕНИЯ ВЕКТОРА СОСТОЯНИЯ САУ
8.1. Цель работы
Изучить метод синтеза наблюдателей для измерения вектора состояния САУ и экспериментально исследовать показатели качества работы разомкнутого и замкнутого наблюдателей.
8.2. Основные понятия и определения
Пусть объект управления описывается уравнением состояния, записанным в матричном виде:
 (8.1)
(8.1)
 , (8.2)
, (8.2)
где X и U - это соответственно вектор состояния объекта управления и вектор управления; А и B - матрицы; У - вектор измеренных координат объекта управления.
В теории управления существует понятие управляемости и наблюдаемости САУ /3/. Причем, если объект является управляемым и наблюдаемым, то он является и идентифицируемым. То есть, по входному сигналу U и измеренному значению Y можно восстановить вектор состояния объекта управления X. Условие управляемости и наблюдаемости имеет вид
 (8.3)
(8.3)
 (8.4)
(8.4)
To есть, ранг матрицы управляемости  и наблюдаемости
и наблюдаемости  должен быть равен порядку дифференциального уравнения (n), описывающего поведение объекта. . *
должен быть равен порядку дифференциального уравнения (n), описывающего поведение объекта. . *
Наблюдатели или идентификаторы могут быть разомкнутыми или замкнутыми. Алгоритм работы разомкнутого наблюдателя имеет вид
/3/:  (8.5)
(8.5)
 , (8.6)
, (8.6)
Здесь  и
и  - соответственно оценочное значение вектора состояния объекта управления и вектор выходных координат наблюдателя.
- соответственно оценочное значение вектора состояния объекта управления и вектор выходных координат наблюдателя.
Ввиду несовпадения начальных условии объекта управления и наблюдателя, то есть  , а также изменений коэффициентов матрицы А или неточного определения на этапе проектирования, такой наблюдатель обладает невысокой точностью измерения и на практике широкого распространения не получил. На практике распространение получили замкнутые наблюдатели, алгоритм функционирования которых имеет вид:
, а также изменений коэффициентов матрицы А или неточного определения на этапе проектирования, такой наблюдатель обладает невысокой точностью измерения и на практике широкого распространения не получил. На практике распространение получили замкнутые наблюдатели, алгоритм функционирования которых имеет вид:
 (8.7)
(8.7)
Структурная схема наблюдателя представлена на рис. 8.1.

|

|
|
|
|
|

|
|
|

|

|
|
|

|

|

|
|
|

|
|
|

|

|
Уравнение (8.7) с учетом (8.2) примет вид
 (8.8)
(8.8)
Собственные значения матрицы
 (8.9)
(8.9)
будут определять быстродействие наблюдателя. Обычно быстродействие наблюдателя принимают в несколько раз выше быстродействия САУ, которая замыкается через наблюдатель.
Целью синтеза наблюдателя является определение коэффициентов матрицы L исходя из его быстродействия. Указанные коэффициенты можно определить методом теории модального управления. Структурная схема исследуемого объекта управления представлена на рис. 8.2.

|

|

|

|

|

|

|

|

|
Необходимо синтезировать наблюдатель для измерения недостающих координат  и
и  по информации о входном воздействии U и выходном х=у. Уравнения состояния объекта управления имеют вид
по информации о входном воздействии U и выходном х=у. Уравнения состояния объекта управления имеют вид



Из (8.10) следует, что

Здесь  ;
; 

Матрица L имеет вид

С учётом (8.14) и (8.11) запишем
 (8.15)
(8.15)
учётом (8.15) выражение (8.9) примет вид

Собственные значения матрицы М определяются из выражения

 (8.17)
(8.17)
где Е - единичная матрица; λ - собственные значения матрицы. Раскрывая выражение (8.17). получим


C учётом (8.12), (8.13) выражение (8.18) примет вид

Зададимся распределением собственных значений матрицы М по Бат- терворту

Здесь n=3.



Расположение собственных значений  показано на рис. 8.3. Согласно теореме Виетта выражение (8.19) можно представить
показано на рис. 8.3. Согласно теореме Виетта выражение (8.19) можно представить

C учётом рис. 8.3

 (8.22)
(8.22)
Причём
 .
.
Модуль собственного значения Н определяет быстродействие наблюдателя /2/

где  время регулирования.
время регулирования.

|

|

|

|

|

|

|

|

|

|
С учётом (8.22) выражение (8.21) примет вид
 (8.25)
(8.25)
Приравнивая коэффициенты при одинаковых степенях  выражений (8.19) и (8.25), получим три уравнения для нахождения
выражений (8.19) и (8.25), получим три уравнения для нахождения  ,
,  и
и  :
:
 (8.26)
(8.26)


Таким образом, методика синтеза заключается в следующем. По быстродействию наблюдателя из (8.24) определяется Н, затем по (8.23) находятся значения  ,
,  ,
,  и по (8.26)-(8.28) определяются значения , и .
и по (8.26)-(8.28) определяются значения , и .
8.3. Схема моделирования объекта совместно с наблюдателем
Раскрывая уравнение (8.7) с учетом (8.11) и (8.14), запишем уравнения состояния замкнутого наблюдателя:


 (8.30)
(8.30)

В разомкнутом наблюдателе 
Уравнения состояния объекта имеют вид

 (8.31)
(8.31)

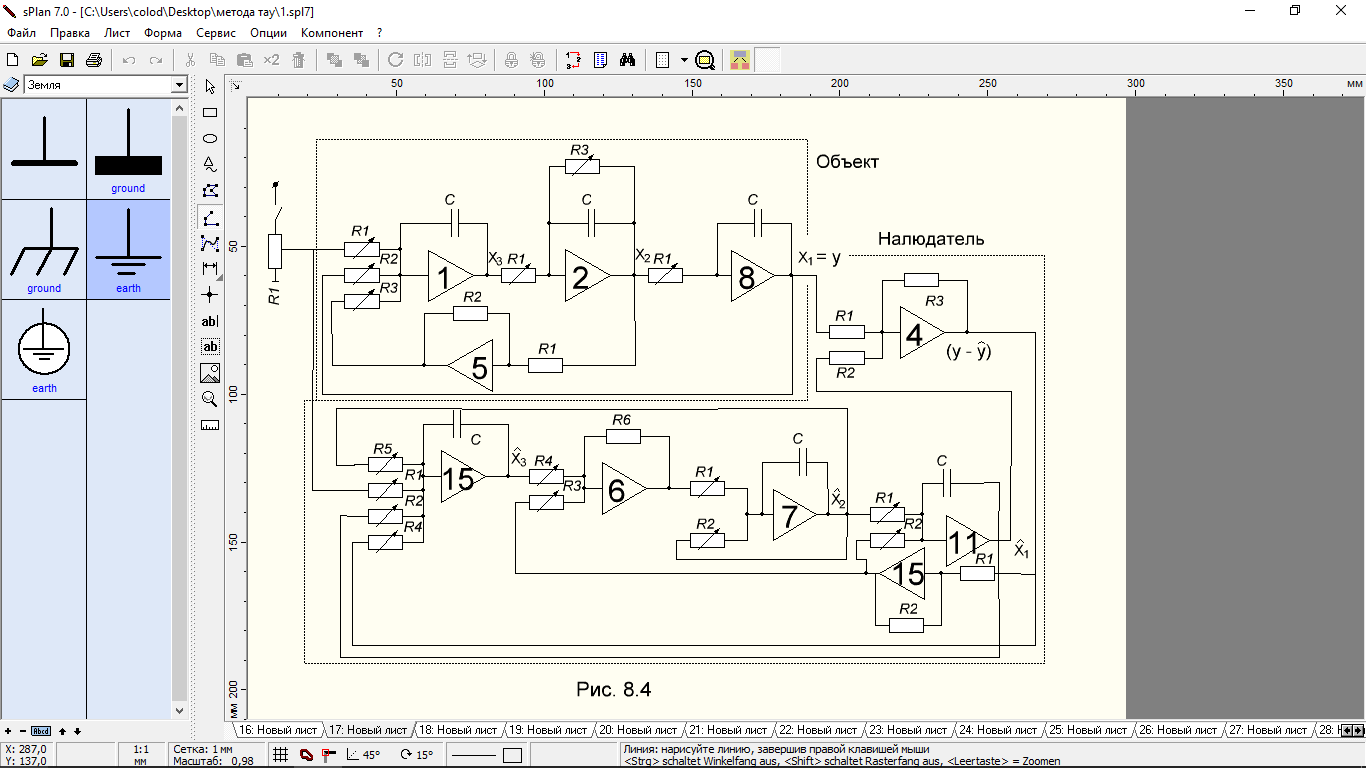
Схема моделирования объекта совместно с наблюдателем (замкнутым) имеет вид, представленный на рис. 8.4.
Положения программных переключателей могут быть определены из следующих соотношений:






В скобках указан номер операционного усилителя.
8.4. Исходные данные к работе
Таблица 8.1
| Характеристика | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |

| 0.2 | 0.22 | 0.25 | 0.18 | 0.25 | 0.3 | 0.25 | 0.3 | 0.27 |

| 0.1 | 0.2 | 0.25 | 0.1 | 0.2 | 0.25 | 0.1 | 0.2 | 0.1 |

| 0.15 | 0.88 | 0.12 | 0.08 | 0.15 | 0.2 | 0.06 | 0.12 | 0.15 |

| 0.2 | 0.2 | 0.1 | 0.1 | 0.1 | 0.05 | 0.1 | 0.05 | 0.2 |
| α | 2 | 1 | 1 | 2 | 2 | 2 | 2 | 1 | 1 |
8.5. Порядок выполнения работы
1. В соответствии с исходными данными табл. 8.1 осуществить синтез наблюдателя для измерения вектора состояния объекта управления.
2. Вычертить схему моделирования объекта управления совместно с наблюдателем с указанием положений программных переключателей.
3. При ступенчатом изменении снять осциллограммы изменения координат объекта управления  ,
,  ,
,  и осциллограммы изменения измеренных координат наблюдателем
и осциллограммы изменения измеренных координат наблюдателем  ,
,  ,
,  для следующих вариантов:
для следующих вариантов:
а) наблюдатель разомкнут (выход усилителя 4 не подключается к наблюдателю);
б) наблюдатель замкнут.
Пункты а) и б) выполняются для случая отклонения параметров объекта от заданных (отклонения , , задаются преподавателем).
4. Пункты I и 2 выполняются в ходе домашней подготовки к выполнению работы.
8.6. Содержание отчёта
1. Название и цель работы.
2. Синтез наблюдателя.
3. Структурная схема наблюдателя совместно с объектом управления.
4. Схема моделирования наблюдателя совместно с объектом управления с указанием положений программных переключателей.
5. Для всех случаев, указанных в пункте 3, построить осциллограммы изменения координат объекту управления и координат, измеренных наблюдателем.
8.7. Контрольные вопросы
1. Понятие управляемости и наблюдаемости САУ.
2. Идентифицируемость объекта управления.
3. Назначение наблюдателей. Разомкнутые и замкнутые наблюдатели.
4. Методика синтеза замкнутых наблюдателей.
5. Недостатки разомкнутых наблюдателей.








