 2020-05-11
2020-05-11 1493
1493При решении задач на равновесие системы сходящихся сил можно использовать три метода: графический, графо-аналитический и аналитический (метод проекций).
Необходимо учитывать, что если рассматривается равновесие плоской системы сходящихся сил, приложенных к одному телу, число неизвестных величин не должно превышать двух (условие статической определимости задачи с плоской системой сходящихся сил):
а) неизвестна одна сила, т. е. ее модуль и направление;
б) неизвестны направления двух сил данной системы;
в) неизвестны модуль одной из сил и направление второй;
г) неизвестны модули двух сил.
При графическом методе решения во всех четырех случаях можно построить замкнутый силовой многоугольник и найти в нем неизвестные величины.
Графо-аналитический метод целесообразно применять в тех случаях, когда рассматривается равновесие трех сил. При этом по условию задачи в произвольном масштабе строится замкнутый треугольник, который затем решается на основе геометрических либо тригонометрических соотношений.
Метод проекций целесообразно применять для решения задач с числом сил больше трех.
Для решения задач статики можно воспользоваться следующим планом.
1. Выбрать объект, равновесие которого следует рассмотреть. Таким объектом может быть точка, тело либо система тел.
2. Приложить действующие на этот объект силы.
3. Отбросить связи, заменив их действие реакциями.
4. Определить тип полученной системы сил. Убедиться, что число неизвестных в задаче равно числу уравнений равновесия, то есть выяснить статическую определимость задачи.
5. Выбрать оси координат. При выборе осей следует помнить, что уравнение будет проще, если в него входит меньшее количество неизвестных, то есть необходимо, по возможности, оси координат брать перпендикулярно одной из неизвестных реакций.
6. На основе полученной схемы сил построить замкнутый силовой треугольник (если рассматривается равновесие трех сил) или составить уравнения равновесия; причем при составлении уравнений проекций оси целесообразно расположить так, чтобы их направления были параллельны или перпендикулярны к искомым силам (оси проекций также показываются на рисунке);
7. После решения уравнений равновесия полученные результаты необходимо проверить либо при помощи неиспользованных уравнений или соотношений, либо путем решения задачи другим способом.
Пример 1. (рис.1.1)
Два стержня связаны между собой и со стеной шарнирами. К шарниру В на нити подвешен груз весом 100 Н. Определить усилия в стержнях.
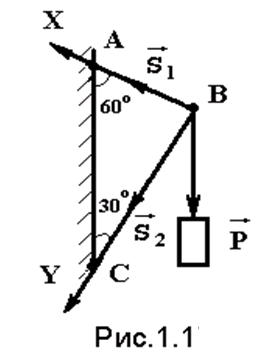 Решение. Поскольку стержни соединены в точке В, она будет служить объектом равновесия. Hа нее будет действовать сила натяжения нити, равная весу груза Р.
Решение. Поскольку стержни соединены в точке В, она будет служить объектом равновесия. Hа нее будет действовать сила натяжения нити, равная весу груза Р.
Связями для точки В служат стержни АВ и ВС. Отбрасывая связи заменим их реакциями – S1 и S2, которые направлены вдоль стержня. Направляя усилия в от точки В предполагаем, что оба стержня растянуты. На точку В действуют три силы, лежащие в одной плоскости и пересекающиеся в одной точке, то есть плоская сходящаяся система сил, для которой можно составить два уравнения равновесия:
S F кx=0, S Fкy=0.
В этих уравнениях находится 2 неизвестных - усилия S1 и S2. Оси координат направим вдоль стержней. Составляем уравнения равновесия.
S F kx= S1 - P cos(600) = 0; (1)
S F ky= S2 +P cos(300) =0. (2)
Из первого уравнения находим:
S1 = P cos(600) = 100 *0,5 = 50 H,
из второго: S2 = - P cos(300) = -100* 0,867= - 86,7 H.
Усилие S2 получилось отрицательным, то есть стержень ВС будет не растягиваться, а сжиматься.
 В данном решении использовался аналитический метод. Для примера приведем геометрическое решение задачи. Для этого нужно построить из сил, действующих на точку В векторный треугольник. Вначале в масштабе построим силу Р (рис.1.2). Из начала и конца этой силы проводим прямые, параллельные усилиям S1 и S2, получая, таким образом, замкнутый силовой треугольник. При этом для замыкания треугольника мы были вынуждены сменить направление усилия S2. Из треугольника, в котором усилие Р является гипотенузой, а S1 и S2 - катетами, находим:
В данном решении использовался аналитический метод. Для примера приведем геометрическое решение задачи. Для этого нужно построить из сил, действующих на точку В векторный треугольник. Вначале в масштабе построим силу Р (рис.1.2). Из начала и конца этой силы проводим прямые, параллельные усилиям S1 и S2, получая, таким образом, замкнутый силовой треугольник. При этом для замыкания треугольника мы были вынуждены сменить направление усилия S2. Из треугольника, в котором усилие Р является гипотенузой, а S1 и S2 - катетами, находим:
S1 = P cos(600) = 100 *0,5 = 50 H,
S2 = P cos(300) = 100* 0,867= 86,7 H.
По теореме синусов:

Пример 2. Определить напряжение веревки F и силу давления шара Р на стену, если сила тяжести шара равна G (рис.1.3).

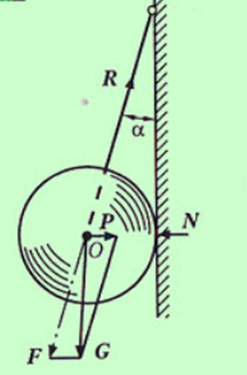
Рис.1.3 Рис.1.4
Решение: Рассмотрим условие равновесия шара. Применив принцип освобождаемости, отбросим связи и заменим их реакциями. Реакция гладкой стены N перпендикулярна стене и проходит через центр шара. Реакция веревки F направлена вдоль линии натяжения веревки и тоже проходит через центр шара. Применим к системе сил условие равновесия
S F I = 0 или G + N + R =0.
Строим замкнутый силовой треугольник в произвольном масштабе вектора известной силы G (рис.1.4). Направление обхода треугольника (т.е. направление стрелок) определяется направлением этой силы. Из построенного силового треугольника получим соотношения:
N = G*tgα, R = G/cosα.
Искомая сила Р давления шара на стену равна, согласно аксиоме взаимодействия, по модулю реакции N стены, но направлена в противоположную сторону.
Натяжение веревки F равно по модулю ее реакции R.
Эту задачу можно решить, разложив силу тяжести шара G по реальным направлениям (направлениям реакций) на составляющие - сила давления шара на стену Р и натяжение веревки F, причем согласно аксиоме взаимодействия: F = R, Р = N.
Из построенного параллелограмма (рис.1.3) легко определить искомые величины. Такой метод решения называют методом разложения силы.
Пример 3.
Два груза весом G1 и G2 находятся в равновесии (рис.1.5). Определить N - натяжение веревки ВС и вес G1, если G2 = 50H; угол α = 600, β =300.
Решение
Т. к. связь (веревка) – гибкая, следовательно, на участке АВ веревка растянута усилием G2. Перенесем в точку В вес G1 и усилие G2 по направлению ВА (т. е заменим действие связи вектором реакции G2. Получим систему сходящихся сил; значит реакция N пройдет также через т. В.


Рис. 1.5
Рис. 1.6
Изобразим систему сил (рис. 1.6), где направления G2 и N показывают, что обе веревки растянуты. Далее обозначим систему координат хВy и спроектируем все действующие силы на оси х и y ( рис.1.7 ):
S F ix = 0; -G2 sin600 + Nsin300 = 0 (1)
S F iy = 0; -G1 + G2 соs600 + Nсоs300 = 0 (2)


Рис.1.7
Из (1): N = G2  ;
;

