 2020-06-12
2020-06-12 205
205Всякий энергетический процесс характеризуется совокупностью физических величин. Эти величины называются координатами или параметрами процесса. При этом объектом управления будет совокупность технических объектов, выполняющих данный процесс трансформации энергии. В ходе управления объектом, стремятся поддерживать управляемые координаты либо постоянными, либо добиваются их изменения по определенному закону. К тому же управление значениями координат необходимо из-за нарушений нормального процесса различного рода возмущениями. Например, изменение нагрузки, воздействие внешней среды, изменением характеристик элементов и другими возмущениями.
На рис. № 3.1 приведена обобщенная схема объекта управления.
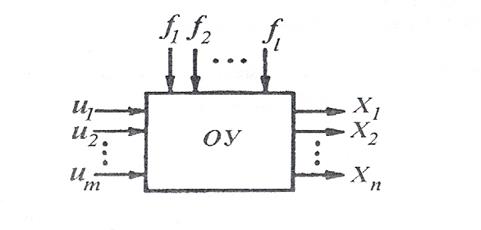
Рис. 3.1 – Обобщенная схема воздействий на объект управления
На схеме  - управляемые и наблюдаемые координаты, или выходные величины ОУ.
- управляемые и наблюдаемые координаты, или выходные величины ОУ.  - возмущающие воздействия,
- возмущающие воздействия,  - управляющие воздействия, с помощью которых через управляющие органы объекта происходит изменение управляемых координат. Управление объектом осуществляется без непосредственного участия человека, с помощью регуляторов. Таким образом совокупность регулятора и объекта управления образуют систему автоматического регулирования (САР).
- управляющие воздействия, с помощью которых через управляющие органы объекта происходит изменение управляемых координат. Управление объектом осуществляется без непосредственного участия человека, с помощью регуляторов. Таким образом совокупность регулятора и объекта управления образуют систему автоматического регулирования (САР).
Большинство САР авиационных силовых установок относится или к системам стабилизации, или к системам программного управления. Системы стабилизации предназначены для поддержания постоянного значения регулируемой координаты  .
.
В системах программного управления имеется программное устройство, вырабатывающее величину  .
.
В авиационной технике используются два фундаментальных принципа управления: принцип компенсации (управление по возмущению) и принцип управления по отклонению.
1. Принцип компенсации (управление по возмущению).

Рис. 3.2 Схема управления по возмущению
Для поддержания постоянного значения координат (параметров процесса)  , измеряются возмущения
, измеряются возмущения  , и в соответствии с ними вносятся коррективы в управляющее воздействие
, и в соответствии с ними вносятся коррективы в управляющее воздействие  . Очевидно, что существует возможность подбора значений управляющих воздействий
. Очевидно, что существует возможность подбора значений управляющих воздействий  , чтобы в установившемся режиме, отклонение отсутствовало
, чтобы в установившемся режиме, отклонение отсутствовало  . Однако следует иметь в виду, что не всегда можно предусмотреть все источники возмущений, и можно все их измерить. Достоинством этого принципа является быстрота реакции.
. Однако следует иметь в виду, что не всегда можно предусмотреть все источники возмущений, и можно все их измерить. Достоинством этого принципа является быстрота реакции.
2. Принцип управления по отклонению

Рис. 3.3 – Схема управления по отклонению
Регулирование по отклонению характеризуется тем, что вместо измерения возмущений ограничиваются измерением регулируемой координаты х. Воздействие на объект происходит в зависимости от отклонения этой координаты от заданного значения. Очевидно, что регулируемая координата не может поддерживаться абсолютно точно, так как только ее отклонение от заданного значения  вызывает управляющее воздействие на объект. Связь между объектом управления и регулятором является отрицательной обратной связью, а сам принцип регулирования называется замкнутым регулированием, где
вызывает управляющее воздействие на объект. Связь между объектом управления и регулятором является отрицательной обратной связью, а сам принцип регулирования называется замкнутым регулированием, где  будет рассматриваться как ошибка регулирования.
будет рассматриваться как ошибка регулирования.
В конце процесса регулирования это отклонение может быть получено как угодно малым. Точность регулирования по отклонению выше, чем при регулировании компенсацией возмущений, поэтому принцип регулирования по отклонению имеет более широкое применение.
В современных ГТД используется и комбинированное регулирование по возмущению и отклонению. Комбинированные регуляторы объединяют достоинства обоих принципов: достигается быстрота реакции на изменение возмущений и точное регулирование.
Регуляторы ГТД по своему составу и конструктивному оформлению весьма разнообразны, что обусловлено их конкретным назначением. По функциональному назначению различают следующие типы регуляторов:
- частоты вращения роторов ГТД;
- температуры газа (за турбиной и перед ней);
- перепуска воздуха в компрессоре;
- углов поворотов лопаток и воздушных винтов;
- ограничения неуправляемых величин;
- приемистости и запуска;
- управления критическими сечениями.








