2020-06-12
2020-06-12 1804
1804Рассмотрим структуру и элементы регулятора, работающего в режиме стабилизации. При замкнутом регулировании какой-либо координаты, определяющей рабочий режим двигателя, от регулятора требуется, чтобы он устойчиво поддерживал ее заданное значение и быстро без больших колебаний восстанавливал это значение, когда произошло отклонение от установившегося режима работы.
При замкнутом регулировании регулятором называется устройство, измеряющее отклонение регулируемой координаты и вырабатывающее воздействие, величина которого зависит от измеренного отклонения. Регулятор имеет измерительный (чувствительный) элемент, регулирующий орган и связывающее их промежуточное передаточное устройство.
В принципе любой регулятор состоит из следующих элементов:

Чувствительные элементы измеряют величину регулируемой координаты или возмущающего воздействия. Мощность их больше мощности чувствительных органов измерительных приборов, так, как обычно они приводят в действие последующий элемент регулятора. Особенно это относится к чувствительным элементам регуляторов прямого действия.
Задающие элементы изменяют настройку регулятора, задавая значение регулируемой координаты.
Сравнивающие элементы служат для выявления разности двух величин, из которых одна может задаваться механизмом настройки, а другая определяется положением регулирующего органа.
Преобразующие элементы предназначены для преобразования одной физической величины в другую без сообщения дополнительной энергии. Например в емкостном преобразователе угол поворота пластины преобразуется в емкость между пластинами. Преобразование происходит в чувствительном элементе. Так, если выработанная им физическая величина неудобна по каким-либо причинам для дальнейшего использования, то в регулятор вводят преобразователь.
В усилительных устройствах сигнал сравнения, равный разности измеренной и заданной величин, воздействует на управляющий элемент усилителя, в результате чего происходит усиление сигнала, передаваемого на его силовые элементы. В гидромеханических регуляторах силовыми элементами обычно являются поршневые гидравлические серводвигатели, в электрических регуляторах – электродвигатели.
Регулирующие органы перемещаются силовыми элементами и изменяют энергетическое состояние объекта регулирования так, что величина регулируемой координаты приближается к заданному значению.
Стабилизирующие устройства служат для гашения колебаний регулируемой величины в процессе ее регулирования. В гидромеханических регуляторах стабилизирующие устройства часто выполняются в виде жестких и изодромных обратных связей. Жидкостные успокоители (демпферы) способствуют гашению колебаний тех звеньев, которые обладают значительной массой. Обратные связи между регулирующим органом или силовым элементом усилителя и его управляющим элементом приводят к «предварительному отключению» гидро- или электродвигателя, что способствует затуханию колебаний регулируемой величины.
Регулирование может вестись или только по величине координаты (параметру рабочего процесса двигателя), или по величине координаты и ее производной по времени. При этом в регуляторе должен быть второй чувствительный элемент, который измеряет скорость изменения координаты.
Отдельные элементы регулятора, например, чувствительный элемент, задающее и сравнивающее устройства, конструктивно могут быть объединены в одном узле. В регуляторах некоторых типов отсутствуют усилители или стабилизирующие элементы.
Схемы регуляторов
http://www.studfiles.ru/preview/6337963/
Для ТРД в качестве регулируемой координаты обычно выбирают частоту вращения ротора. Регулирование частоты вращения производится изменением расхода топлива. В соответствии с принципом регулирования по отклонению, регулятор будет иметь чувствительный элемент, который измеряет частоту вращения ротора. При отклонении частоты вращения от заданного значения чувствительный элемент перемещением регулирующего органа изменяет подачу топлива так, чтобы заданная частота вращения восстановилась.
Рассмотрим основные принципы построения и схемы регуляторов частоты вращения. Свойства, присущие этим схемам, сохраняют свою силу и при регулировании любых других параметров.
Статический регулятор прямого действия. Регулятором прямого действия называется регулятор, у которого чувствительный элемент непосредственно связан с регулирующим органом. Перемещение регулирующего органа происходит за счет энергии самого чувствительного элемента.
На рис. 3.4 приведена одна из возможных схем регулятора частоты вращения прямого действия.

Рис. №3.4
Из схемы видно, что чувствительный элемент регулятора состоит из шарнирно закрепленных грузиков 1, муфты 2, и пружины 3. При вращении грузиков развивается центробежная сила, осевая составляющая которой перемещает муфту 2 и связанную с ней через рычаг дозирующую топливную иглу 5 (регулирующий орган). Положение муфты и дозирующей иглы определяется равенством осевой составляющей центробежной силы и силы сжатия пружины. Для настройки регулятора на другую частоту вращения перемещается упор пружины 4.
При переходе к новой высоте или скорости полета изменяется момент сопротивления на компрессоре двигателя или, иначе говоря, изменяется нагрузка двигателя. Новой величине нагрузки должен соответствовать другой расход топлива, т.е. другое положение дозирующей иглы 5. Нетрудно убедиться, что регулятор, выполненный по этой схеме, при изменении нагрузки не может точно поддерживать заданную частоту вращения (упор 4 пружины чувствительного элемента не изменяет своего положения). Действительно, если у земли при расходе топлива  двигатель работает с частотой вращения
двигатель работает с частотой вращения  , то с переходом на высоту
, то с переходом на высоту  (при этом считается число Маха Мн неизменным) дозирующая игла должна быть несколько опущена, что уменьшит проходное сечение и обеспечит расход топлива
(при этом считается число Маха Мн неизменным) дозирующая игла должна быть несколько опущена, что уменьшит проходное сечение и обеспечит расход топлива  . Перемещение на схеме иглы вниз повлечет за собой перемещение муфты 2 вверх и некоторое увеличение сжатия пружины 3. Однако, дополнительное сжатие пружины может произойти только при увеличении частоты вращения двигателя до
. Перемещение на схеме иглы вниз повлечет за собой перемещение муфты 2 вверх и некоторое увеличение сжатия пружины 3. Однако, дополнительное сжатие пружины может произойти только при увеличении частоты вращения двигателя до  . Таким образом, регулятор прямого действия не может поддерживать частоту вращения постоянной при изменении внешних условий.
. Таким образом, регулятор прямого действия не может поддерживать частоту вращения постоянной при изменении внешних условий.
Соответствующая приведенному рассуждению характеристика  показана на рис. 3.4б, где линии 1 и 2 требуемые расходы топлива соответственно у земли и на высоте , линия 3 – расход топлива, поддерживаемый регулятором:
показана на рис. 3.4б, где линии 1 и 2 требуемые расходы топлива соответственно у земли и на высоте , линия 3 – расход топлива, поддерживаемый регулятором:
 (3.1)
(3.1)
где  - фактор режима двигателя, величина которого зависит от положения задающего элемента регулятора;
- фактор режима двигателя, величина которого зависит от положения задающего элемента регулятора;  - коэффициент усиления тахометра;
- коэффициент усиления тахометра;  - коэффициент пропорциональности, который в общем случае может быть связан с другими параметрами рабочего процесса, например, с давлением за компрессором
- коэффициент пропорциональности, который в общем случае может быть связан с другими параметрами рабочего процесса, например, с давлением за компрессором  .
.
Величина  называется статистической ошибкой регулирования, а регулятор – статическим. Статический регулятор прямого действия прост по своему устройству, и это является его достоинством. К недостаткам регуляторов этого типа относятся, во-первых, необходимость увеличения массы грузиков, и, следовательно, размеров регулятора для получения достаточно больших перестановочных усилий на регулирующем органе. Во-вторых, это статическая ошибка регулирования, возрастающая тем сильнее, чем больше изменяется нагрузка на двигатель.
называется статистической ошибкой регулирования, а регулятор – статическим. Статический регулятор прямого действия прост по своему устройству, и это является его достоинством. К недостаткам регуляторов этого типа относятся, во-первых, необходимость увеличения массы грузиков, и, следовательно, размеров регулятора для получения достаточно больших перестановочных усилий на регулирующем органе. Во-вторых, это статическая ошибка регулирования, возрастающая тем сильнее, чем больше изменяется нагрузка на двигатель.
Астатический регулятор непрямого действия. Регулятором непрямого действия называют регулятор, у которого связь между чувствительным элементом и исполнительным органом осуществляется через промежуточный элемент, так, что исполнительный орган перемещается за счет энергии какого-либо постороннего источника.
Структурная схема САР с астатическим регулятором непрямого действия представлена на рисунке 3.5.
Чувствительный элемент регулятора связан с золотником 1 гидравлического поршневого серводвигателя. На схеме золотник находится в нейтральном положении, которое соответствует равновесной частоте вращения. Поршень сервомотора 2 с чувствительным элементом жестко не связан, и при данном положении муфты чувствительного элемента 3 может занимать любое положение. Это означает, что регулятор выполненный по этой схеме, способен поддерживать заданную частоту вращения при различных нагрузках двигателя. Его расходная характеристика  показана на рис. 3.5, б. Линии 1 и 2 – требуемые расходы топлива у земли и на высоте
показана на рис. 3.5, б. Линии 1 и 2 – требуемые расходы топлива у земли и на высоте  ; линия 3 – расход топлива, поддерживаемый регулятором. При отклонении режима работы двигателя от равновесного, например, в сторону увеличения частоты вращения, под действием избыточной силы муфта чувствительного элемента, перемещаясь вверх поворачивает рычаг АС относительно точки С. Сместившийся вверх золотник 1 открывает доступ рабочей жидкости в верхнюю полость цилиндра серводвигателя, поршень и дозирующая игла начинают движение вниз, подача топлива уменьшается и частота вращения двигателя также уменьшается. В это же время рабочая жидкость из другой полости цилиндра серводвигателя свободно вытекает.
; линия 3 – расход топлива, поддерживаемый регулятором. При отклонении режима работы двигателя от равновесного, например, в сторону увеличения частоты вращения, под действием избыточной силы муфта чувствительного элемента, перемещаясь вверх поворачивает рычаг АС относительно точки С. Сместившийся вверх золотник 1 открывает доступ рабочей жидкости в верхнюю полость цилиндра серводвигателя, поршень и дозирующая игла начинают движение вниз, подача топлива уменьшается и частота вращения двигателя также уменьшается. В это же время рабочая жидкость из другой полости цилиндра серводвигателя свободно вытекает.

Рисунок 3.5. – Структурная схема САР с астатическим регулятором
непрямого действия
Уравнение расхода астатического регулятора имеет вид
 (3.2)
(3.2)
Для регулятора данного типа, определенной является не сама линия расхода 3, а знак и величина производной  . У астатического регулятора непрямого действия нет недостатков, присущих регулятору, приведенному на рис. 3.4а. Так, в регуляторе рис. 3.5 отсутствует статическая ошибка регулирования, и, большие перестановочные усилия на дозирующей игле могут быть получены при небольших размерах чувствительного элемента и всего регулятора.
. У астатического регулятора непрямого действия нет недостатков, присущих регулятору, приведенному на рис. 3.4а. Так, в регуляторе рис. 3.5 отсутствует статическая ошибка регулирования, и, большие перестановочные усилия на дозирующей игле могут быть получены при небольших размерах чувствительного элемента и всего регулятора.
Однако отсутствие непосредственной связи между чувствительным элементом и дозирующей иглой затрудняет регулирование.
Обычно процесс регулирования при изменении настройки регулятора данной схемы или нагрузки двигателя носит медленно затухающий колебательный характер. Это связано с тем, что вследствие инерционности маховых масс турбины и компрессора, изменение частоты вращения ротора, двигателя отствает от изменения расхода топлива, отрицательно сказываются также и воздействие силы сухого трения в элементах регулятора. Для улучшения процесса регулирования в регуляторе непрямого действия нужно связать поршень серводвигателя с золотником и контролировать движение дозирующей иглы, как это сделано в регуляторе с жесткой обратной связью.
Статический регулятор непрямого действия (регулятор с жесткой обратной связью). Схема регулятора с жесткой обратной связью приведена на рисунке 3.6

Рис. 3.6 Схема статического регулятора непрямого действия
Очевидно, что такая схема является дальнейшим развитием схемы астатического регулятора непрямого действия. На отклонение режима работы двигателя от равновесного, чувствительный элемент, золотник и дозирующая игла реагируют также, как к астатического регулятора непрямого действия. Однако здесь движение поршня серводвигателя не остается бесконтрольным. Шток поршня увлекает за собой рычаг АС, и золотник, связанный с рычагом АС, уменьшает сечение щели подвода рабочей жидкости к серводвигателю, приближаясь к нейтральному положению. Процесс регулирования быстро заканчивается.
Нетрудно убедиться, что улучшение динамических характеристик двигателя с регулятором данной схемы достигается ценой статической ошибки регулирования. Для подтверждения этого следует представить себе расположение деталей регулятора при фиксированном упоре пружины для двух режимов работы двигателя: у земли с большим расходом топлива, и на высоте – с малым расходом.
Когда заканчивается процесс регулирования, золотник занимает нейтральное положение, перекрывая своими поясками оба канала, связывающие полости цилиндра серводвигателя с каналом подвода рабочей жидкости. Следовательно, на различных установившихся режимах работы двигателя точка В рычага АС занимает одно и то же положение. С увеличением высоты полета для уменьшения подачи топлива дозирующая игла должна опуститься, при этом опустится и точка С рычага АС до положения С'. При неизменном положении точки В, точка А рычага АС, поднимается до положения А', вместе с рычагом переместится вверх и муфта чувствительного элемента, сильнее сжимая пружину.
Такое перемещение дозирующей иглы, рычага и муфты может произойти только в том случае, если частота вращения двигателя несколько увеличится и появится избыточная центробежная сила, сжимающая пружину. Следовательно, при неизменной настройке регулятора с жесткой обратной связью, рост высоты полета (уменьшение нагрузки двигателя), приводит к увеличению частоты вращения. Очевидно, что рост скорости полета при неизменной высоте (увеличение нагрузки двигателя) снизит частоту вращения. Соотве5тствующая этим рассуждениям расходная характеристика  приведена на рисунке 3.6б. Здесь линии 1 и 2 – требуемые расходы топлива соответственно у земли и на высоте Н. Линия 3 – расход топлива, поддерживаемый регулятором. Статическая ошибка регулирования выразится
приведена на рисунке 3.6б. Здесь линии 1 и 2 – требуемые расходы топлива соответственно у земли и на высоте Н. Линия 3 – расход топлива, поддерживаемый регулятором. Статическая ошибка регулирования выразится  .
.
Если изменить соотношение плеч рычага АС, то это отразится и на статической, и на динамической характеристиках регулятора. Так, если при неизменной длине рычага АС уменьшить плечо АВ, то статическая ошибка регулирования снизится (линия 4). Процесс регулирования будет более продолжительным, и может принять колебательный характер. Регулятор по своим характеристикам будет приближаться к астатическому регулятору. При увеличении плеча АВ (длина рычага АМ остается неизменной) статическая ошибка растет (линия 5), процесс регулирования будет быстро заканчиваться.
Нетрудно вывести приближенную зависимость для оценки статической ошибки регулирования. Обозначив  перемещение дозирующей иглы, и
перемещение дозирующей иглы, и  - перемещение муфты чувствительного элемента, составим соотношение между ними для различных статических режимов в виде
- перемещение муфты чувствительного элемента, составим соотношение между ними для различных статических режимов в виде
 , (3.3)
, (3.3)
где а и b – плечи рычага АС.
Если принять квадратичную зависимость осевой составляющей центробежной силы от частоты вращения в виде
 ,
,
где с – коэффициент пропорциональности, то приращение центробежной силы
 ,
,
где  – частота вращения исходного статического режима,
– частота вращения исходного статического режима,  – приращение частоты вращения.
– приращение частоты вращения.
Приращение центробежной силы на новом статическом режиме уравновесится приращением силы сжатия пружины
 ,
,
где В – характеристика пружины. Используя последнее выражение и уравнение связи между  и
и  , получим следующую зависимость
, получим следующую зависимость
 (3.4)
(3.4)
Для определения статической ошибки на каком-либо режиме, по отношению к исходному режиму с частотой вращения  , кроме величин, характеризующих регулятор, нужно располагать проливочной характеристикой дозирующей иглы . Определив по этой характеристике величину для рассматриваемого нового режима, подсчитаем статическую ошибку регулирования. Уравнение расхода (222) справедливо и для этого типа регулятора.
, кроме величин, характеризующих регулятор, нужно располагать проливочной характеристикой дозирующей иглы . Определив по этой характеристике величину для рассматриваемого нового режима, подсчитаем статическую ошибку регулирования. Уравнение расхода (222) справедливо и для этого типа регулятора.
Изодромный регулятор. Схема изодромного регулятора частоты вращения (рис. 3.7) является дальнейшим развитием схемы регулятора с жесткой обратной связью. Она сочетает в себе достоинства астатического регулятора и регулятора с жесткой обратной связью: отсутствие статической ошибки регулирования, хорошие динамические характеристики при удачно выбранных параметрах регулятора. Изодромом называют устройство, обеспечивающее гибкую обратную связь (коэффициент обратной связи меняется во времени) в автоматических регуляторах. Изодром действует только в переходных режимах. Из схемы следует, что в изодромном регуляторе, жесткой обратной связи между поршнем серводвигателя и золотником нет. Поршень серводвигателя соединен с рычагом АС не непосредственно, а через специальное устройство, носящее название катаракт. В данной схеме катаракт состоит из поршня 2, связанного рычагом АС, цилиндра 1, соединенного с поршнем серводвигателя, и пружины 4, которая работает как на сжатие, так и на растяжение. Цилиндр катаракта заполнен вязкой жидкостью (топливом или маслом), его полости по обе стороны поршня 2 соединены между собой каналом, в который помещен жиклер 3.
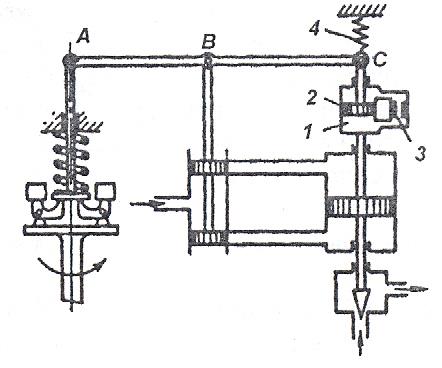
Рисунок 3.7 Схема изодромного регулятора частоты вращения
В начале процесса регулирования, изодромный регулятор ведет себя как статический регулятор. При отклонении режима двигателя от равновесного, например, в сторону увеличения частоты вращения, золотник сместится вверх и откроет доступ рабочей жидкости в верхнюю полость цилиндра серводвигателя. Поршень серводвигателя начнет перемещаться вниз и увлечет за собой рычаг АС так же, как в регуляторе с жесткой обратной связью. Золотник будет приближаться к нейтральному положению.
Однако на этом процесс регулирования не закончится. При движении точки С рычага АС вниз растянется пружина 4 и на поршне 2 возникнет перепад давлений. Под действием этого перепада жидкость через жиклер 3 будет перетекать из верхней полости цилиндра в нижнюю. Растянутая пружина 4, сжимаясь, несколько приподнимает рычаг и золотник, в результате чего, поршень серводвигателя и дозирующая игла переместятся еще немного вниз.
Подобные рассуждения можно продолжить и дальше, двигатель постепенно будет приближаться к равновесному режиму работы. Поршень серводвигателя и связанная с ним дозирующая игла в процессе регулирования при изменении нагрузки сначала большую часть своего пути проходят быстро, а остаток пути при приближении к новому равновесному режиму сравнительно медленно.
Нетрудно убедиться, что по окончании процесса регулирования статическая ошибка будет полностью ликвидирована. При изменении нагрузки на новом равновесном режиме двигателя золотник и пружина катаракта займут нейтральное положение, поршень серводвигателя и дозирующая игла сместятся, а положение поршня катаракта относительно его цилиндра изменится.
Динамическую характеристику изодромного регулятора можно приблизить как к характеристикам статического, так и астатического регуляторов. Если уменьшать сечение жиклера 3 или снижать жесткость пружины 4, ноизодромный регулятор будет приближаться к статическому, а время необходимое для снятия статической ошибки регулирования, будет увеличиваться. В пределе, заглушив жиклер 3 и сняв пружину 4, получим статический регулятор с жесткой обратной связью, подобный рассмотренному выше.
При уменьшении сопротивления жиклера 3, и увеличении жесткости пружины 4, регулятор по своим свойствам приближается к астатическому и становится им при закреплении на шарнире точки С рычага АС и удалении катаракта.
Уравнение расхода 3.2 справедливо и для изодромного регулятора. Динамические характеристики регуляторов различных схем рассматривались в предположении, что действия регулятора каждый раз направлены на устранение влияния внешних возмущений и изменившейся нагрузки и приводят регулируемый параметр объекта к заданной величине. В действительности так бывает не всегда. Неудачно выбранные параметры регулятора или неучтенное влияние сухого (кулоновского) трения может привести к медленно затухающим колебаниям регулируемой координаты или даже к колебаниям с нарастающей амплитудой.
Регулятор непрямого действия с регулированием по частоте вращения и угловому ускорению. В ранее рассмотренных схемах, эффективное вмешательство регулятора в работу двигателя начинается лишь тогда, когда за счет избыточной силы развиваемой грузиками, преодолеваются силы трения в механизме регулятора и чувствительный элемент перемещается на некоторую величину от исходного положения.
Существуют регуляторы, которые реагируют как на отклонение (изменение) координаты, так и на скорость ее изменения. Применительно к регулированию частоты вращения, такой регулятор изменяет подачу топлива при отклонении угловой скорости и появлении углового ускорения. Это дает возможность уменьшить отклонение регулируемой координаты в начале процесса регулирования.
Сказанное можно пояснить с помощью характеристик, показанных на рисунке 3.8. Допустим, что у двигателя, работающего без регулятора, наблюдаются колебания угловой скорости по синусоиде относительно заданного статического режима (кривая ). Регулятор должен гасить эти колебания, но чтобы он вступил в действие требуется некоторое начальное отклонение частоты вращения (пусть это будет  ). При отклонении частоты вращения по синусоиде возникает угловое ускорение, изменяющееся по косинусоиде (кривая
). При отклонении частоты вращения по синусоиде возникает угловое ускорение, изменяющееся по косинусоиде (кривая  ), и наибольшим оно будет в начальный момент, когда
), и наибольшим оно будет в начальный момент, когда  .
.
|
|

Рисунок 3.8 Характеристики регулятора непрямого действия
с регулированием по частоте вращения и угловому ускорению
Если в регуляторе сделать два параллельных чувствительных элемента, реагирующих на  и
и  , то для эффективного действия регулятора потребуется меньшее начальное отклонение частоты вращения (
, то для эффективного действия регулятора потребуется меньшее начальное отклонение частоты вращения ( ).
).
Чувствительные элементы, реагирующие на угловое ускорение, называются акселерометрами. Регулирование частоты вращения или какого-либо другого параметра рабочего процесса по отклонению и по производной легче осуществить при использовании электрических регуляторов. Однако могут быть применены и гидромеханические элементы.
Дополнительное воздействие по производной с тем же эффектом улучшения динамических характеристик регулирования можно заменить регулированием по нагрузке. Для ГТД нагрузка определяется величиной крутящего момента на валу ротора. Однако регулирование частоты вращения двигателя только по величине нагрузки или по угловому ускорению невозможно. Это объясняется тем, что одно и то же угловое ускорение может наблюдаться при различных частотах вращения, а одной и той же нагрузке (одному и тому же крутящему моменту) при изменении скоростей и высот полета будут соответствовать разные частоты вращения двигателя.
Законы управления
Законом управления называют математическую зависимость, в соответствие с которой регулятор вырабатывает управляющее воздействие. Наиболее распространенными законами, реализуемыми в линейных регуляторах систем управления, в которых используются принцип отклонения. Предполагается, что регулятор является безинерционным устройством. Если перейти к относительным координатам отклонения  и управления
и управления  , где
, где  и
и  – некоторые значения координат x и u, принятые за базовые.
– некоторые значения координат x и u, принятые за базовые.
Пропорциональный закон (П – регулятор).
 (3.5)
(3.5)
где  – коэффициент усиления (передачи) регулятора.
– коэффициент усиления (передачи) регулятора.
Регуляторы, осуществляющие этот закон, называются П – регуляторами. К ним относятся регуляторы прямого действия и с жесткой обратной связью.
Интегральный закон (И – регулятор)
 , или
, или  (3.6)
(3.6)
где постоянная  имеет размерность времени и называется постоянной времени интегрирования. Этот закон осуществляется в астатических регуляторах и обеспечивает астатическое регулирование, так как процесс регулирования заканчивается только тогда, когда отклонение (ошибка регулирования)
имеет размерность времени и называется постоянной времени интегрирования. Этот закон осуществляется в астатических регуляторах и обеспечивает астатическое регулирование, так как процесс регулирования заканчивается только тогда, когда отклонение (ошибка регулирования)  .
.
Пропорционально- интегральный закон (ПИ – регулятор)
 , (3.7)
, (3.7)
Этот закон осуществляется в изодромных регуляторах и также обеспечивает астатическое регулирование.
Пропорционально-интегрально-дифференциальный закон (ПИД – регулятор)
 , (3.8)
, (3.8)
где и  – постоянные времени интегрирования и дифференцирования соответственно. Этот закон обеспечивает астатическое регулирование. Производная
– постоянные времени интегрирования и дифференцирования соответственно. Этот закон обеспечивает астатическое регулирование. Производная  вводится в закон регулирования для повышения качества процесса регулирования.
вводится в закон регулирования для повышения качества процесса регулирования.