 2020-07-12
2020-07-12 121
121Демодуляцию (demodulation) мы определим как восстановление сигнала (в неискаженный узкополосный импульс), а обнаружение (detection) - как процесс принятия решения относительно цифрового значения этого сигнала.
Вероятность появления ошибки  - степень возможности наступления ошибки.
- степень возможности наступления ошибки.
Вероятности появления ошибки e  - ошибка появится при передаче одного из сигналов si(t), если вследствие шума канала уровень переданного сигнала
- ошибка появится при передаче одного из сигналов si(t), если вследствие шума канала уровень переданного сигнала  упадет ниже
упадет ниже  .
.
Плотности условного распределения  – является правдоподобием si, показывает плотность вероятности при условии передачи символа si.
– является правдоподобием si, показывает плотность вероятности при условии передачи символа si.
Априорные вероятности  – вероятности появления -го класса сигнала до эксперимента .
– вероятности появления -го класса сигнала до эксперимента .
Равновероятная передача сигналов – передача сигналов, при которой вероятность того, что будет передан первый, или второй сигнал – одинаковая.
Порог – это оптимальный порог ля минимизации вероятности принятия неверного решения при равновероятных сигналах и симметричных правдоподобиях.
Условие задачи:
Двоичная система связи передает сигналы 
 . Тестовая статистика приемника
. Тестовая статистика приемника  , где компонент сигнала
, где компонент сигнала  равен
равен  или
или  , а компонент шума
, а компонент шума  имеет равномерное распределение. Плотности условного распределения
имеет равномерное распределение. Плотности условного распределения  даются выражениями
даются выражениями



и

Определите вероятность появления ошибки для равновероятной передачи сигналов и использования оптимального порога принятия решения.
Дано:
si(t) (i =1,2) – двоичный сигнал;
 , где z(T) – тестовая статистика приемника,
, где z(T) – тестовая статистика приемника,
ai - компонент сигнал, n0 – компонент шума;
 , где a1 – компонент сигнала s1(t);
, где a1 – компонент сигнала s1(t);
 , где a2 – компонент сигнала s2(t);
, где a2 – компонент сигнала s2(t);

 ;
;


 ;
;
где  и
и  – плотности условного распределения;
– плотности условного распределения;
Найти:
Вероятность появления ошибки РB -?
Решение:
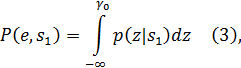
1) В данной работе нам необходимо определить вероятность появления ошибки для равновероятной передачи сигналов. Для этого используем формулу приведенную ниже:

где P(e, si) – вероятность появления ошибки e при передаче двоичного сигнала si(t);
P(si) – априорная вероятность передачи двоичного сигнала si(t).
2) Согласно условию задачи значения  , тогда формула (1) примет следующий вид:
, тогда формула (1) примет следующий вид:

где P(e, s1) и P(e, s2 ) - вероятности появления ошибки e при передаче сигналов s1(t) и s2(t);
P(s1) и P(s2) – априорные вероятности передачи сигналов s1(t) и s2(t).
3) В формуле (2) имеются несколько неизвестных величин:
P(e, s1) и P(e, s2 ), P(s1) и P(s2), которые определим используя формулы представленные ниже:


где - это оптимальный порог для минимизации вероятности принятия неверного решения. Величину можем узнать из следующей формулы:
где a1 – компонент сигнала s1(t), a2 – компонент сигнала s2(t).
3) Вычисляем значение оптимального порога  по формуле (6):
по формуле (6):

4) Подставляя формулы (3), (4) и (5) в формулу (1) получаем основную формулу для нахождения вероятности появления ошибки , приведенную ниже:

5) Рассмотрим рисунок 1, характеризующий условие нашей задачи:

Рис.1 Плотности условных вероятностей:  и
и 
Для вычисления вероятности появления ошибки  мы должны проинтегрировать
мы должны проинтегрировать  и
и  .
.
5) Определяем вероятность появления ошибки по формуле (7), используя области интегрирования представленные выше:

Ответ: значение вероятности появления ошибки  .
.
Заключение
В данной работе для определения вероятности появления ошибки мы использовали следующую формулу:

где P(e, si) - вероятность появления ошибки e при передаче двоичного сигнала si(t);
P(si) – априорная вероятность передачи двоичного сигнала si(t).
Для решения нашей задачи большое значение приходится на величину .
- это оптимальный порог для минимизации вероятности принятия неверного решения. Величину мы определяли из следующей формулы:
где a1 – компонент сигнала s1(t), a2 – компонент сигнала s2(t).








