 2020-06-30
2020-06-30 125
125Задано: Т1 = 1; ТИ = 0,8; ТСМ =1; ТОР = 2 с; kОР = 1; kl = 1; kУ =1; kЧЭ = 1; переходный процесс вызван уменьшением l на 100 %.
Приближенный расчёт ведем, руководствуясь следующей логикой.
1. При скачке l в системе автоматического регулирования первым реагирует объект регулирования, меняем дифференциал на конечное приращение.
 ,
,  ,
,  и т. д.
и т. д.
2. Следующий элемент, реагирующий на изменение, – это чувствительный элемент:
 .
.
3. Далее по структурной схеме идёт элемент сравнения:

4. Следующий по структурной схеме – второй элемент сравнения:

5. Следующий по структурной схеме – усилительный элемент:

6. Далее по структурной схеме идёт сервомотор:
 ,
,  ,
,  и т. д.
и т. д.
7. Далее, сигнал от сервомотора идёт на изодром:
 ,
,  ,
,  и т. д.
и т. д.
Затем расчёт повторяется. Сервомотор изменяет сигнал, идущий на объект регулирования, и все семь пунктов повторяются.
После нескольких вычислений выделяем несколько ячеек и тянем их вниз по столбцу. Программа Excel автоматически повторяет формулы и расчёт.
Далее выделяем столбцы х6 и t и строим график х6=f(t) (рис. 12).
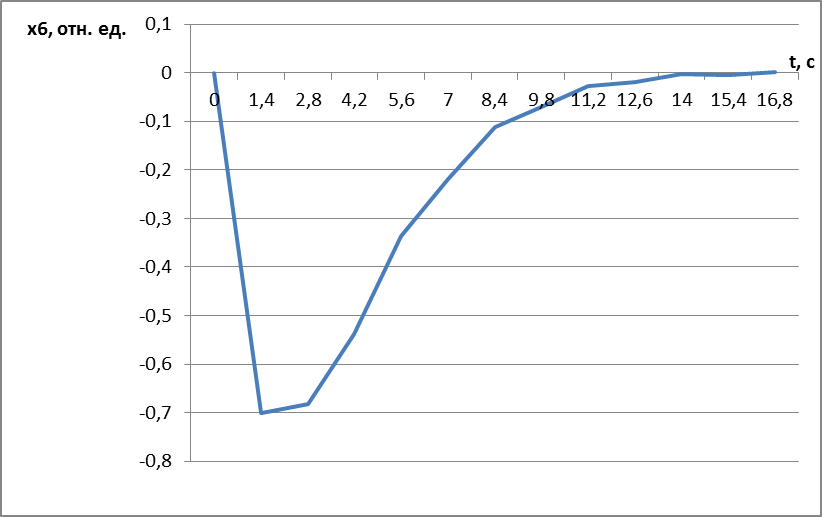
Рис. 12. Динамическая характеристика системы регулирования
при заданном изменении возмущающего воздействия
Определение динамической характеристики
При изменении настройки
Задание
Построить, используя методы приближенного вычисления, динамическую характеристику системы автоматического регулирования (САР) по известным уравнениям составляющих систему звеньев и структурной схеме САР (рис. 11) при ступенчатом изменении настройки.
Числовые значения коэффициентов дифференциальных уравнений (см. п. 2.1) для расчёта приведены в табл. 6.
Таблица 6
Коэффициенты дифференциальных уравнений
| № варианта
| Численные значения коэффициентов дифференциальных уравнений | ||||||||
| Т1 | ТИ | ТСМ | ТОР | kОР | kl | kУ | kЧЭ | Переходный процесс вызван | |
| 1 | 1 | 0,6 | 1,2 | 1,5 | 1,1 | 1 | 1 | 1 | увеличением настройки на 20 % |
| 2 | 1 | 0,5 | 1,1 | 1,2 | 1,1 | 1 | 1 | 1 | уменьшением настройки на 20 % |
| 3 | 1 | 0,5 | 1 | 1,2 | 1,1 | 1,2 | 1 | 1 | увеличением настройки на 20 % |
| 4 | 1 | 0,5 | 1 | 1,2 | 1 | 1,2 | 1 | 1 | уменьшением настройки на 20 % |
| 5 | 1 | 0,5 | 1 | 2 | 1 | 1,1 | 1 | 1 | увеличением настройки на 10% |
| 6 | 1 | 0,5 | 1 | 2 | 1 | 1,2 | 1 | 1 | уменьшением настройки на 10 % |
| 7 | 1 | 0,5 | 1 | 2 | 1 | 1,1 | 1 | 1 | уменьшением настройки на 10 % |
| 8 | 1 | 0,5 | 1 | 2 | 1 | 1,1 | 1 | 1 | увеличением настройки на 10 % |
| 9 | 1 | 0,5 | 1 | 2 | 1 | 1,2 | 1 | 1 | увеличением настройки на 100 % |
| 10 | 1 | 0,5 | 1 | 2 | 1 | 1,2 | 1 | 1 | увеличением настройки на 100 % |
Пример выполнения задания
Задано: Т1 = 1; ТИ = 0,8; ТСМ =1; ТОР = 2 с; kОР = 1; kl = 1; kУ =1; kЧЭ = 1; переходный процесс вызван увеличением х0 на 100 %, соответственно l = 0.
Приближенный расчёт ведем, руководствуясь следующей логикой.
1. При скачке х0 в системе автоматического регулирования первым реагирует элемент сравнения, х0 в момент, равный нулю, становится не равным х7 (структурная схема, рис. 10):
 ,
,  .
.
2. Следующий элемент сравнения по структурной схеме сравнивает сигналы х1 и х5:
 ,
,  .
.
3. Следующий по структурной схеме – усилительный элемент:

4. Далее по структурной схеме идёт сервомотор:
, , и т. д.
5. Далее, сигнал от сервомотора идёт на изодром:
, , и т. д.
6. Сигнал от сервомотора идёт на объект регулирования:
 , , и т. д.
, , и т. д.
7. Следующий элемент, реагирующий на изменение, – это чувствительный элемент:

Далее расчёт идёт по замкнутому кругу, и все семь пунктов повторяются.
После нескольких вычислений выделяем несколько ячеек и тянем их вниз по столбцу. Программа Excel автоматически повторяет формулы и расчёт.
Далее выделяем столбцы х6 и t и строим график х6=f(t) (рис. 13).

Рис. 13. Динамическая характеристика системы регулирования
при заданном изменении задающего воздействия








