 2020-06-30
2020-06-30 85
85Задано: kР = 1; ТИ = 0,8; ТД =1; ТОР = 2 с; kОР = 1; kl = 1; kУ =1; переходный процесс вызван увеличением l на 100 %.
Приближенный расчёт ведем, руководствуясь следующей логикой.
1. При скачке l в системе автоматического регулирования первым реагирует объект регулирования, меняем дифференциал на конечное приращение
 ,
,  ,
,  и т. д.
и т. д.
2. Следующий элемент, реагирующий на изменение нагрузки, – это элемент сравнения:

3. Следующий элемент, реагирующий на изменение, – это П-составляющая ПИД-регулятора:

4. Следующий элемент, реагирующий на изменение, – это И-составляющая ПИД-регулятора:
х3= 
 ,
,  ,
,  и т. д.
и т. д.
 5. Следующий элемент, реагирующий на изменение, – это Д-составляющая ПИД-регулятора:
5. Следующий элемент, реагирующий на изменение, – это Д-составляющая ПИД-регулятора:


6. Далее находим сумму трёх составляющих ПИД-регулятора:
 .
.
Расчёт повторяется. Сервомотор изменяет сигнал, идущий на объект регулирования, и все шесть пунктов повторяются.
После нескольких вычислений выделяем несколько ячеек и тянем их вниз по столбцу. Программа Excel автоматически повторяет формулы и расчёт.
Выделяем столбцы х6 и t и строим график х6=f(t) (рис. 15, 16).
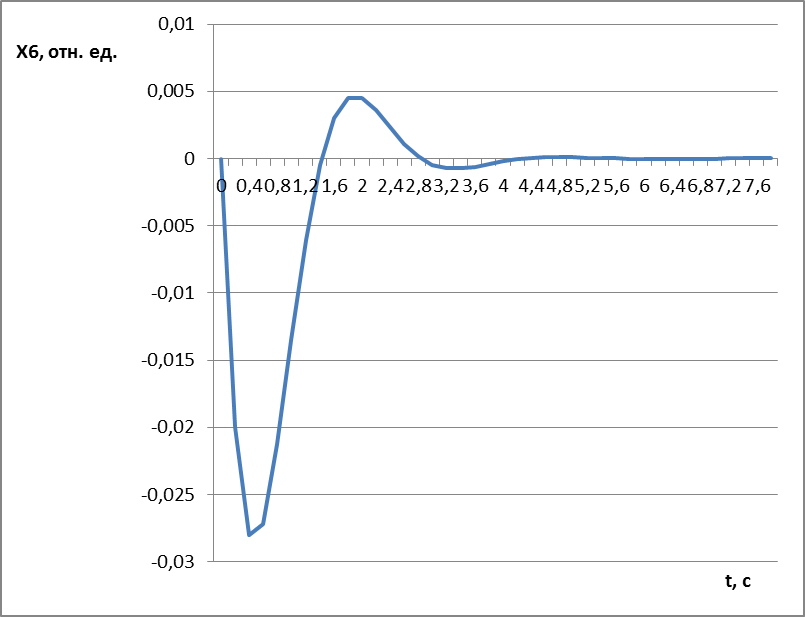
Рис. 15. Динамическая характеристика системы регулирования
при заданном изменении возмущающего воздействия при ТД=0
Рис. 16. Динамическая характеристика системы регулирования
при заданном изменении возмущающего воздействия при ТД=0,1
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1. Панасенко А. А. Основы автоматики и теории управления техническими системами. Практические работы: учеб.-метод. пособие. – Владивосток: Мор. гос. ун-т, 2016. – 35 с.
2. Эксплуатация автоматики: метод. указ. и справочные материалы / сост. Панасенко А. А. – Владивосток: Мор. гос. ун-т, 2014. – 51 с.
3. Липатников Г. А. Основы теории автоматического управления линейными динамическими системами: учеб. пособие. – Владивосток: Мор. гос. ун-т, 2010. – 85 с.
4. Бесекерский В. А., Попов Е. П. Теория систем автоматического управления. – СПб.: Изд-во «Профессия», 2003. – 752 с.
5. Основы автоматики и теории управления техническими системами: метод. указ. и контрольные задания для студентов заочного факультета и открытого института / сост. Слесаренко В. Н., Глушак Л. В. – Владивосток: Мор. гос. ун-т, 2007. – 23 с.
6. Слесаренко В. Н. Глушак Л. В. Экспериментальные методы анализа динамики систем автоматического управления: учеб. пособие. – Владивосток: Мор. гос. ун-т, 2002. – 99 с.
7. Блох Э. Ш. Динамика линейных систем автоматического регулирования машин. – М.: Изд-во «Государственное издательство технико-теоретической литературы», 1952. – 491 с.
8. Д. Сю, А. Мейер. Современная теория автоматического управления и ее применение [пер. с англ.]. – М.: Изд-во «Машиностроение», 1972. – 544 с.
9. Выгодский М. Я. Справочник по высшей математике. – М.: Изд-во «Гос. изд. физ.-мат. литературы», 1963. – 872 с.
10. В. А. Иванов, В. С. Медведев, Б. К. Чемоданов и др. Математические основы теории автоматического регулирования: учеб. пособие для вузов – М.: Изд-во «Высшая школа», 1971. – 808 с.
11. Зельдович Я. Б., Мышкис А. Д. Элементы прикладной математики: учеб. пособие для вузов – М.: Изд-во «Наука», 1965. – 616 с.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Выгодский М. Я. Справочник по высшей математике. – М.: Изд-во «Гос. изд. физ.-мат. литературы», 1963. – 872 с.
2. Математические основы теории автоматического регулирования: Учеб. пособие для вузов / В. А. Иванов, В. С. Медведев, Б. К. Чемоданов и др. Под ред. Б. К. Чемоданова – М.: Изд-во «Высшая школа», 1971. – 808 с.
3. Зельдович Я. Б., Мышкис А. Д. Элементы прикладной математики: учеб. пособие для вузов – М.: Изд-во «Наука», 1965. – 616 с.








