2014-02-04
2014-02-04 2234
2234«Характеристики дорожных контроллеров»
В нашей стране выпускались контроллеры различных типов, они отличаются по конструктивному исполнению и реализуемой ими техникой управления движением. Выделяют 3 этапа выпуска контроллеров:
1) Контроллеры 1-го поколения выпускались до 1980 года.
Особенности:
А) выполнялись на дискретных элементах.
Б) узкая специализация.
В) отсутствие возможности управления по отдельным перекрёсткам движения.
Г) ограниченное число фаз регулирования.(не более трех).
Модели 1-го поколения:
Локальные:
Упрощённые контроллеры серии УК
Пешеходные и универсальные вызывные устройства ПВУ-2М, УВУ-2М
Счётно-программное решающее устройство управления транспортом СПРУТ-1М
Системные:
БКТ-3М, БКТ-4, БКТ-5, БКТ-6, БКТ-7.
Рост интенсивности движения и усложнение схем организации движения потребности дальнейшего совершенствования технических средств управления.
2) Начиная с 1980 года в эксплуатации появились контроллеры 2-го поколения. Отличительной особенностью 2-го поколения является их построение из унифицированных блоков (агрегатный принцип). Унификация позволила сократить число блоков примерно в 10 раз. Были применены интегральные схемы, улучшилась технология управления:
А) Появилась возможность управлением движением по отдельным перекрёсткам.
Б) Увеличение числа фаз регулирования.
В) В контроллерах появилось устройство обеспечивающее безопасность движения, при выходе из строя ламп красного сигнала или включения ламп на разных направлениях.
Модели 2-го поколения.
Локальные:
ДКЛ-4, ДКМ-4.4
Системные:
ДКМ-2С.4, ДКМ-5.4, ДКМ-5.8, ДКМ-6.4.
Контроллер для управления дорожными знаками ДК-7
3)С 1985 года освоено производство контроллеров 3-го поколения с использованием микропроцессорной техники. Эти контроллеры имеют существенное отличие от контроллеров предыдущего поколения. ДКМП-1М, ДКМ-2С.4, ДКЛ-7МП.1, ДКЛ-МП.2
Переход к производству контроллеров этого типа связан:
1. С широким внедрением микропроцессоров в сферу управления технологическими процессорами в народном хозяйстве;
2. Необходимость реализации более эффективных режимов управления дорожным движением и построением разнообразных и гибких структур автоматизированных систем управления движением, приспособленных для городов с различной УДС в условиях высокой интенсивности транспортных и пешеходных потоков.
В настоящее время ведется разработка и других типов дорожных контролеров. Это позволит в дальнейшем полностью перейти на использование технических средств третьего поколения.
Назначение и классификация детекторов транспорта
ДТ-прибор который предназначен:
1) Для обнаружения ТС
2) Для определения параметров Т.П.
Сведения, которые выдаёт детектор транспорта используют для организации гибкого регулирования, а также для расчёта или автоматического выбора программ управления дорожным движением. Любой детектор транспорта состоит из следующих основных элементов.
1) Чувствительный элемент
2) Усилитель-преобразователь.
3) Выходное устройство.
Общая структурная схема детектора транспорта имеет следующий вид:
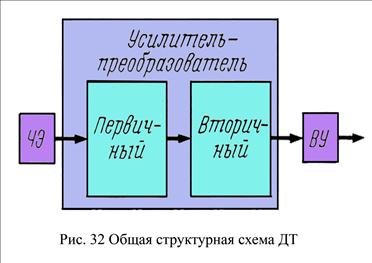
Ч.Э. воспринимает факт прохождения или присутствуя ТС в контролируемой детектором зоне. ТС засекается в виде изменения какого-либо физического параметра и вырабатывается первичный сигнал.
Усилитель-преобразователь усиливает сигнал, преобразует его в вид удобный для реконструкции измеряемого параметра. Усилитель-преобразователь может состоять из 2 узлов (первичного и вторичного). В отдельных детекторах вторичный преобразователь может отсутствовать или совмещаться с первичным в едином функциональном узле.
Выходное устройство предназначено для хранения и передачи по специально выделенным каналам связи в управляющий пункт или контроллер сформированной детектором транспорта информации.
ДТ классифицируются:
-по назначению
-по принципу действия Ч.Э.
-по специализации (измеряемому параметру).
По назначению детекторы делятся:
1) На проходные
2) Детекторы присутствия.
Проходные детекторы выдают нормирование по длительности сигнала, при появлении ТС в контролируемой детектором зоне. Параметры сигнала не зависят от времени нахождения в этой зоне ТС. Этот тип детекторов фиксирует только факт появления автомобиля. Детекторы присутствия выдают сигнал в течение всего времени нахождения ТС в зоне контролируемой детектором.
Детекторы присутствия выдают сигналы в течении всего времени нахождения ТС в зоне, контролируемой детектором. Эти типы детекторов предназначены:
1. в основном для обнаружения предзторовых и заторовых состояний потока;
2. определения длины очереди;
3. для определения транспортных задержек.
II По принципу действия – чувствительные элементы детекторов транспорта можно разделить на 3 группы:
1. контактного типа
2. излучения
3. измерения параметров ЭМ систем.
Чувствительные элементы контактного типа бывают электромеханические, пневматические, пьеза электрические.
Их объединяет то, что сигнал о появлении автомобиля возникает от непосредственного его соприкосновения с чувствительным элементом. При электромеханическом соприкосновение происходит с электрическим контактором. В пневматическом с шлангом, в пьеза электрическом с пьеза элементом.
Электромеханический чувствительный элемент состоит из двух стальных полос завулканизированных герметически резиной, его устанавливают перпендикулярно направлению движения ТС на уровне дорожного покрытия. При наезде колес автомобиля на чувствительный элемент контакты замыкаются, и формируется электрический импульс.
Пневмоэлектрический чувствительный элемент представляет собой резиновую трубку заключенную в стальной лоток. Лоток состоит из секций эластично соединенных между собой. Один конец трубки заглушен, а другой связан с пневмореле. При наезде автомобиля на трубку давление воздуха в ней повышается действуя на мембрану в пневмореле и замыкая его электрические контакты.
Пьезоэлектрический чувствительный элемент – представляет собой полимерную пленку. Она способна поляризовать на поверхности электрический заряд при механической деформации. Для предохранения от механических воздействий, повреждений пленку оборачивают резиновой лентой, а ленту оборачивают латунной сеткой. Эта сетка одновременно является электростатическим экраном. Чувствительный элемент крепят на поверхности дорожного покрытия механическими скобами.
Чувствительным элементам контактного типа присущ общий недостаток – они считают число осей, а не число автомобилей. Для устранения этого недостатка в схеме детектора необходимо применять специальный временный селектор. Кроме этого их работоспособность зависит от климатических условий.
Чувствительные элементы излучения бывают:
− фото электрические
− радарные
− ультразвуковые
Фото электрический чувствительный элемент включает в себя источник светового луча и приемник с фотоэлементом. При прерывании луча ТС изменяется освещенность фото элемента. Это приводит к изменению его электрических параметров. Луч света должен быть направлен поперек проезжей части поэтому излучатель и фото приемник располагают по разные стороны дороги напротив друг друга. Они могут располагаться и в одном корпусе. В этом случае луч света отражается от установленного на противоположной стороне дороги зеркала.
Недостатком фото электрических чувствительных элементов является погрешность измерений возникающих при многорядном интенсивном движении автомобилей.
Радарный чувствительный элемент представляет собой направленную антенну. Она устанавливается сбоку проезжей части или под ней. Излучение направляется вдоль дороги и отражается от движущегося автомобиля и принимается антенной. Радарный детектор фиксирует факт проезда автомобиля контролируемый с зоны и определяет скорость автомобиля по разности частот колебаний излученной и отраженной радиоволн (эффект Доплера).
Ультра звук. Чувствительный элемент. Он представляет собой приемоизлучатель импульсного направленного луча. Он выполнен в виде параболического рефлектора, с помещенным внутри пьезоэлектрическим преобразователем, который генерирует ультразвуковые импульсы. Приемоизлучатель устанавливают под проезжей частью на высоте 7-10 метров.
В работе этого детектора используется принцип ультразвуковых импульсов от поверхности проходящего автомобиля.
Автомобиль регистрируется при обнаружении разницы в интервалах времени от момента посылки до приема импульсов, отраженных от автомобиля или дорожного покрытия.
III К чувствительным элементам измерения параметров э/м систем относят:
1. магнитные чувствительные элементы
2. индуктивные чувствительные элементы
Магнитный чувствительный элемент состоит из катушки с магнитным сердечником, катушку помещают в трубу для защиты от повреждений и закладывают в дорожное покрытие на глубину 15-30 см. Автомобиль регистрируется благодаря искажению магнитного поля в момент прохождения автомобиля прохождения автомобиля под чувствительным элементом (ЧЭ). Транспортные средства, движущиеся со скоростью менее 10 км/ч, не регистрируются.
Индуктивный ЧЭ представляет собой рамку, которая состоит из одного или двух витков изолированного и защищенного от механических воздействий провода.
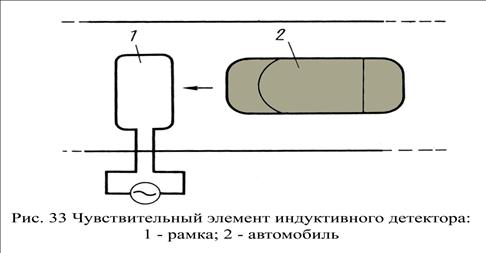
Рамку закладывают в дорожное покрытие на глубину 5-8 см. при прохождении под рамкой автомобиля, обладающего металлической массой, продуктивность рамки изменяется и автомобиль регистрируется.
Специализация детекторов зависит от параметров ТП, для определения которого он предназначен (интенсивность движения, плотность, состав, скорость и т.д.).
Принципы построения детекторов основаны на методах прямого и косвенного определения этих параметров.
Прямыми методами определяют момент прохождения автомобилем контролируемой зоны  и время присутствия автомобиля в этой зоне
и время присутствия автомобиля в этой зоне  . Остальные параметры можно определить косвенно через эти показатели.
. Остальные параметры можно определить косвенно через эти показатели.
Среднюю скорость автомобиля  м/с, определяют по времени прохождения или базового расстояния
м/с, определяют по времени прохождения или базового расстояния  между сечениями дороги i и j/
между сечениями дороги i и j/

где  - расстояние между сечениями ij;
- расстояние между сечениями ij;
 - моменты прохождения автомобилем соответственно счений дороги i и j, с.
- моменты прохождения автомобилем соответственно счений дороги i и j, с.
Временной интервал между n-м и (n-1)-м автомобилем  в одном и том же сечении дороги
в одном и том же сечении дороги
Число автомобилей между сечениями i и j в момент времени t

где  - число автомобилей прошедших за время t соответственно через сечения i и j;
- число автомобилей прошедших за время t соответственно через сечения i и j;
 - начальное число автомобилей между этими сечениями.
- начальное число автомобилей между этими сечениями.
Длина автомобиля: