 2014-02-02
2014-02-02 4415
4415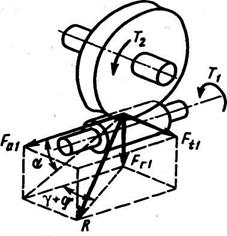 |
Как известно из теоретической механики, полная реакция негладкой поверхности отклоняется от нормали на величину угла трения. Поэтому
Рис.3.30.
сила R взаимодействия витка червяка и зуба червячного колеса (равная векторной сумме силы нормального давления и силы трения) будет отклоняться от средней плоскости червячного колеса на угол  (см. рис. -3.30), где
(см. рис. -3.30), где  —
—
угол подъема линии витка;  — приведенный угол трения.
— приведенный угол трения.
Разложим силу R на три взаимно перпендикулярные составляющие по реальным направлениям, в результате чего получим:
окружная сила на червяке, равная осевой силе Рис. 330 на червячном колесе,
 ; (3.69)
; (3.69)
осевая сила на червяке, численно равная окружной силе на червячном колесе,
 ; (3.70)
; (3.70)
радиальная сила на червяке и червячном колесе
 . (3.71)
. (3.71)
В приведенных формулах Т1, Т2 — вращающие моменты на валу червяка и червячного колеса; d1, d2 — диаметры делительных цилиндров червяка и червячного колеса;  - угол профиля витка червяка в осевом сечении.
- угол профиля витка червяка в осевом сечении.
Вращающие моменты на валах червяка и червячного колеса связаны зависимостью:
 (3.7)
(3.7)
где η — КПД передачи; и — передаточное число.
Коэффициент полезного действия червячной передачи определяется потерями на трение в зацеплении, потерями на перемешивание и разбрызгивание масла и потерями в опорах валов, причем в червячных передачах последние два вида потерь отдельно не учитываются, так как они относительно невелики и зафиксированы при экспериментальном определении значений φ', приведенных в табл.3.11.
Потери на трение в червячном зацеплении определяются так же, как в винтовой паре, поэтому КПД червячной передачи при ведущем червяке определяем по формуле
 (3.73)
(3.73)
где γ — угол подъема линии витка; φ' — приведенный угол трения, определяемый по табл. 3.11.
Так как η возрастает с увеличением угла γ, то КПД червячных передач повышается с увеличением числа витков червяка.
При проектных расчетах, когда элементы конструкции и размеры червяка и червячного колеса еще неизвестны, ориентировочно можно принимать следующие значения КПД:
| При z1 = 1 | η = 0,7…0,75; | |
| При z1 = 2 | η = 0,75…0,82; | |
| При z1 = 3 | η = 0,82…0,87; | |
| При z1 = 4 | η = 0,87…0,92 |
При ведомом червяке КПД червячной передачи определим по формуле
 (3.74)
(3.74)
Из этой формулы видно, что при  , т. е. передача движения от колеса к червяку оказывается невозможной и передача будет самотормозящей.
, т. е. передача движения от колеса к червяку оказывается невозможной и передача будет самотормозящей.
КПД самотормозящей передачи (при ведущем червяке) очень мал, например, если  , получим
, получим
 (3.75)
(3.75)
Поэтому самотормозящие червячные передачи следует применять только тогда, когда необходимо гарантировать устранение возможности самопроизвольного обратного движения (грузоподъемные механизмы), или когда потери энергии не имеют существенного значения (приборы, отсчетные устройства).
Необходимо учитывать, что в условиях толчков и вибраций возможны значительные колебания приведенного коэффициента трения (следовательно, и приведенного угла трения), поэтому самоторможение практически не может быть гарантировано и при  .
.








