 2014-02-02
2014-02-02 830
830Предположим, что произведены независимые, измерения параметров элементов некоторой выборки. В результате измерений получена дискретная последовательность значений параметров в виде случайных величин x1,x2,…,xn. Требуется произвести математическую обработку результатов измерений с целью получения числовых характеристик и закона распределения случайной величины х. Приведем примерную последовательность обработки результатов измерений.
Целесообразно начать с определения статистического математического ожидания mх которое равно

Затем составляют таблицу отклонений случайных величин от статистического математического ожидания mx, Δxi=xi — mх.
Находят квадраты отклонений Δx2i, а затем определяют статистическую дисперсию
Определяют полуразмахи хтах — пгх и тх— хт\п рассеяния случайной величины х относительно статистического математического ожидания. Затем разбивают полуразмахи хmax—mх и mх — хmin на 10 — 20 одинаковых интервалов (разрядов) ΔN с целью построения гистограммы. Иногда для вычисления числа разрядов N используют формулу N=1+3,3Inn.
Определяют количество попаданий случайных значений xi в каждый из разрядов Nj после чего вычисляют статистические частоты fi попадания случайной величины х в каждый из разрядов fj=Nj/n.
После этого переходят к построению гистограммы, представляющей собой статистическую плотность распределения дискретных значений случайной величины х (рис. 1.16).
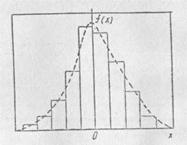
Рис. 1.16. Гистограмма и функция плотности
Каждая из площадей прямоугольников, образованных величиной разряда ΔNj и статистической частотой fj, представляет собой статистическую вероятность попадания случайной величины в j-й разряд, Рj=fjΔNj. Суммируя площади прямоугольников гистограммы, получают эмпирический закон (рис. 1.17) вероятности для случайной величины х.
Затем находят закон, описывающий полученную зависимость F*(x)+ При этом подбирают один из наиболее близких по виду тео-
ретических законов распределения вероятностей к полученному эмпирическому (статистическому) закону. Оценивают согласованность теоретического и статистического законов. Для этой цели используют критерии согласия, например, критерий А. Н. Колмогорова, Н. В. Смирнова или Пирсона.
Все критерии согласия построены по одной схеме. Выбирается некоторый параметр в качестве меры расхождения эмпирического и теоретического законов. Этот параметр не должен зависеть от проверяемого закона, он должен быть прост и достаточно чувствителен к отклонению статистического закона от теоретического.
Рассмотрим некоторые из критериев согласия и методику их использования при обработке результатов измерений.
Критерий А. Н. Колмогорова. Этот критерий применяют для случая, когда число элементов выборки достаточно велико, обычно двадцать и более. Рассматривают две функции. Одна из них является функцией, описывающей теоретический закон, а вторая — эмпирический, т. е. F(x) и F*[x). В качестве меры рассогласования законов принимают максимальное значение (по модулю) разности

А. Н. Колмогоров доказал, что для любой функции при неограниченном возрастании числа независимых наблюдений п существует вероятность выполнения неравенства
 (1.11)
(1.11)
где Q(λ) — вероятность несогласования; λ — число, заключенное между нулем и двумя, т.е. 2 > λ > 0; α — уровень значимости,' обычно α > 0,3. А. Н. Колмогоров построил таблицу значений Q(λ) и соответствующих им значений л (табл 1. приложения).
Оценку согласованности законов производят следующим образом. На одном графике строят теоретический и эмпирический законы (рис. 1.18) и по графику находят ΔFmax, после чего определяют λ=ΔFmax√n.
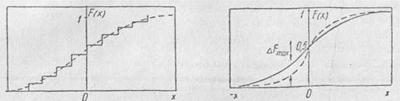
Рис. 1.17. График функции вероятности
Рис. 1.18. График, поясняющий использование критерия согласия Колмогорова
Для найденного значения λ по табл. 1 приложения подбирают соответствующее значение Q(λ), после чего определяют α=1-Q(λ).
Если α > 0,3, то согласованность считают достаточной.
Пример. Произведены измерения параметров элементов выборки n=25. После построения теоретического и эмпирического законов наибольшее значение ΔFmsx составило 0,2. Определить согласие законов.
Решен и е. Находим λ

Из табл. 1 приложения находим значение Q(λ)=0,8. Определяем α=1—Q(λ)=0,2. В данном случае α<0,3, следовательно, согласованность законов слабая.
Критерий Н. В. Смирнова. Этот критерий был предложен для проверки предположения о принадлежности двух выборок одной генеральной совокупности.
Предположим, что произведено n1 независимых измерений выборки х и n2 независимых измерений выборки у. В результате обработки данных получены две эмпирические функции F*(х) и F*(y). Максимальное рассогласование этих функций по модулю

Н. В. Смирнов установил, что случайная величина
 (1.12)
(1.12)
удовлетворяет закону Q(λ), установленному А. Н. Колмогоровым при n1→∞ и n2→∞.
Определив λ находят по таблице А. Н. Колмогорова соответствующее значение Q(λ), а затем определяют α, т. е. уровень значимости. Если α>0,3, то предположение о принадлежности двух выборок одной генеральной совокупности подтверждается.
Пример Произведены независимые измерения параметров элементов двух выборок n1=n2=100. После обработки результатов изменений определено значение ΔFmsx=0.1. Требуется подтвердить предположение о принадлежности двух выборок одной генеральной совокупности.
Решение. Находим

Из таблицы (приложение П. 1) находим Q(λ)=0,3, а затем α=1-Q(λ)=0,7. Следовательно, гипотеза о принадлежности двух выборок одной генеральной совокупности подтверждается.
Критерий Пирсона. Для этого; критерия за меру рассогласования принимают χ2, значение этой величины находят из равенства
Где n - объем выборки; Р*t — эмпирическая вероятность попадании случайной величины в i-й разряд (рис. 1.19); Рi — теоретическое значение вероятности для иго разряда (рис. 1.19); N—число разрядов, на которое разбит размах выборки.
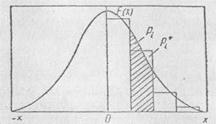
Рис. 1.19. График, поясняющий критерий согласия Пирсона
Для χ2 составлена табл. 2 приложения, где ее значения соответствуют определенным уровням значимости а и числу степеней свободы К, K=N-r-1, где r —число параметров выбранного закона.
Для нормального закона число параметров равно двум, Это σ и m, т.е. среднее квадратическое отклонение и математическое ожидание.
По формуле (1.13) определяют значение χ2 и сравнивают его с табличным значением χ2. Если χ2табл>χ2, то согласие считается удовлетворительным.
Заметим, что этот критерий применяют для определения согласия законов при малых объемах выборок, обычно n≤25.
Рассмотренный метод обработки результатов контроля качества пригоден для классического эксперимента. Однако в последние годы большое внимание уделяется многофакторному эксперименту, который находит все более широкое распространение и применение в практике.
Эксперимент стал играть активную роль в процессе конструирования аппаратуры. С его помощью вскрываются взаимосвязи, ранее не известные разработчику. Он позволяет восполнить недостающую информацию и уточнить отдельные теоретические положения, выдвигаемые при проектировании и, наконец, эксперимент является практической проверкой показателей качества разработанной аппаратуры.
До недавнего времени эксперимент в основном применялся при испытаниях и был инструментом анализа. В настоящее время его роль возросла и он стал использоваться при синтезе аппаратуры.
В процессе инженерного эксперимента могут иметь место Два плана: эксперимент классического или последовательного плана и эксперимент случайного или рандомизированного плана, зачастую называемый факторным экспериментом.
При последовательном эксперименте задают некоторые значения варьируемому параметру, т. е. аргументу и отслеживают значения функции. Обычно изменение аргумента производится от минимального значения до его максимального значения с равными интервалами. Однако, последовательный эксперимент может строиться по иной схеме, когда задают равные или одинаковые приращения функции при произвольных значениях аргумента.
Наиболее сложным вопросом при последовательном эксперименте является выбор шага изменения аргумента, так как от его правильного выбора в значительной степени зависит точность результата, т. е. точность определения функции. При последовательном эксперименте побочные (случайные) факторы не учитываются.
В процессе проведения факторного эксперимента влияние побочных факторов не исключается, око учитывается путем варьирования всеми факторами, т. е. путем введения рандомизации. Рассмотрим принцип рандомизации на примере [19].
Необходимо проверить эффективность нового инструмента, например, резца. В данном случае зависимой переменной, т. е. функцией является продукция, а независимой переменной — скорость резания. В этом эксперименте имеется еще одна переменная—это рабочий. Для проведения эксперимента нужен некоторый «средний» рабочий. Выберем случайным образом четырех рабочих и четыре скорости резания, включая максимальную и минимальную. Построим эксперимент так, чтобы каждый рабочий смог поработать на каждой скорости резания хотя бы один день. План эксперимента может быть представлен табл. 1.3.
Такой план является несовершенным, в нем не учтен фактор натренированности рабочего и ослабление его внимания. Иными словами, в [данном случае не произведена рандомизация
рабочего дня.
Скорость резания на каждый день рабочий выбирает по жребию. В этом случае план эксперимента может быть представлен табл. 1.4.
Таблица 1.3
| Рабочий | Дни недели и скорости реза и и я | |||
| Понедельник | Вторник | Среда | Четверг | |
| А | ||||
| Б | ||||
| В | ||||
| Г | о |
Таблица 1.4
| рабочий | Дни недели и скорости резания | |||
| Понеделник | Вторник | Среда | Четверг | |
| А | ||||
| Б | ||||
| В | ||||
| Г |
Такой план называют латинским квадратом 4X4. Здесь выступают четыре фактора или, как принято говорить в теории эксперимента, четыре уровня: скорость резания, различные рабочие, различные дни недели и жребий при выборе скорости резания.
Если уровень шесть, то квадрат должен иметь 6X6 факторов.
Это уже вызывает сложности, поэтому используют греко-латинский квадрат 3x3, т. е. берут блоки, каждый из которых содержит по 3X3 факторов из квадрата 6x6 факторов.
Перейдем к некоторым количественным показателям, используемым при рандомизированном эксперименте. Полагаем, что план эксперимента полностью рандомизируется. Эксперимент ставится таким образом, чтобы варьировались все факторы одновременно. При этом увеличивается точность статистической оценки изучаемого явления.
Для обработки экспериментальных данных используется дисперсионный анализ, позволяющий проверить гипотезу о наличии эффекта, вносимого исследуемым фактором, путем выделения и сравнения двух дисперсий: дисперсии, характеризующей изменение уровней исследуемого фактора; дисперсии, характеризующей рассеяние, связанное с ошибкой эксперимента.
Пример. Исследуем влияние положения платы на результат испытания ее динамических свойств на вибрирующем основании. Рассмотрим влияние одного из факторов — положение платы на столе вибростенда. Будем располагать плату в трех положениях. Одно положение от другого отличается поворотом платы на вибрирующем основании на 120° (рис. 1.20).
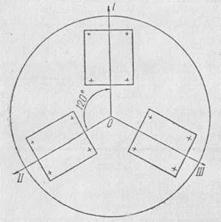
Рис. 1.2.0. Схема расположения монтажных плат на вибрирующем основании
Наряду с исследуемым фактором проявляются и другие факторы, например: влияние различных партий плат, временная нестабильность процесса измерений ииспытаний, возможные индивидуальные погрешности, вносимые разными операторами.
Выделим на этом фоне случайных явлений главный фа ктор — положение платы.
Предположим, что достаточной будет выборка, состоящая из шести плат, проверяемых шестью операторами в течении шести дней.
Для организации выборки воспользуемся таблицей случайных чисел. Возьмем из таблицы подряд те числа, у которых две последние цифры имеют предел 1—6. Первая цифра будет обозначать номер платы, а вторая — номер дня испытания. Составим план эксперимента в виде табл. 1.5.
Вычислим суммарное значение измеренных амплитуд вибрации для каждого
уровня n

Вычислим среднее значение суммарных амплитуд вибрации по уровням
где К = 3.
Оценим влияние уровней

Вычислим математическое ожидание амплитуд вибрации
Следовательно, амплитуда вибрации с учетом влияния /-го уровня составит
где ξ— инструментальная погрешность; ΔYj — погрешность, вносимая j-м уровнем.
Т а бл и ца 1.5
| Номер оператора, n | Положение платы | |||||
| уровень А | уровень В | уровет С | ||||
| А | YА | В | Yв | С | YC | |
| 6/6 | YA1 | 6/1 | YB1 | 3/6 | YC1 | |
| 4/1 | YА2 | 6/2 | YB2 | 2/6 | YC2 | |
| 5/1 | YА3 | 2/5 | YB3 | 1/4 | YC3 | |
| 3/5 | Yа4 | 2/4 | YB4 | 5/3 | YC4 | |
| 2/5 | Yа5 | 3/3 | YB5 | 3/6 | YC5 | |
| 1/3 | Yа6 | 3/6 | YB6 | 3/5 | YC6 | |
| YАΣ | YBΣ | YCΣ |
Вычислим математические ожидания амплитуд вибрации для каждого из уровней,

Определим дисперсии для каждого уровня

Вычислим дисперсию по всему ансамблю измерений
Сравним дисперсии, полученные для уровней, с дисперсией всего ансамбля измерений

Полученные значения ΔD, позволяют судить о влиянии уровней, т.е. о наличии или отсутствии фактора—положения платы.
Глава 2
ПРОГНОЗИРОВАНИЕ КАЧЕСТВА И СОСТОЯНИЙ КОНСТРУКЦИИ
2.1. Аналитический и вероятностный методы прогнозирования
Операцией прогнозирования назовем мероприятие, направленное на предсказание исправной работы объекта пли его состояний на некоторый наперед заданный момент времени и состоящее из постановки задачи, формирования математической модели, ее решения и оценки результатов.
Прогнозирование базируется на экспериментальных данных или статистическом материале о значениях показателей качества объекта в функции времени. Эти показатели являются исходными для построения эмпирических функций изменения параметров, которые затем используются для формирования математических моделей.
Результаты прогнозирования считаются удовлетворительными, если значения показателей качества на прогнозируемый период времени больше допустимых значений или ожидаемая вероятность безотказной работы Рф больше заданной Рд:
Рф≥Рд; Кiф≥Кiд
где Кiф, Кiд — значение фактическое i-ro показателя качества и допустимое.
Рассмотрим вначале аналитическое прогнозирование с использованием экстраполяции эмпирических функций. В общем случае предсказание качества базируется на результатах исследований технического состояния объекта или на статистических данных эксплуатации совокупностей сопоставимых объектов.
Учитывая изложенное, можно выделить два способа прогнозирования: 1) инструментальное (аналитическое), основанное на результатах исследования экспериментальным путем характеристик объекта; 2) статистическое (вероятностное), основанное на опыте и результатах эксплуатации сопоставимо подобных объектов.
Предположим, что исследуемый объект можно довольно полно охарактеризовать некоторым информативным показателем качества x(t). Известны его значения в некоторые моменты времени t1 и t2. Кроме того, известно его допустимое значение хд. Требуется определить значение показателя качества в момент времени tп по условиям прогнозирования.
В математическом смысле поставленная задача является задачей экстраполяции. Для ее решения воспользуемся экспериментальными данными.
Известны x(t1), x(t2). Требуется определить x(tп). В простейшем случае можно предположить, что показатель качества изменяется линейно, тогда функция изменения показателя качества опишется зависимостью x(t)=а+b(t).
Если найдены неизвестные а и b, то, подставив вместо t время, требуемое по прогнозу tп определим значение x(tп); если x(tп)>>хд, то объект будет работоспособным на прогнозируемом интервале времени.
На основе экспериментальных данных составим систему уравнений, которая позволяет рассчитать неизвестные а и b
Решив систему уравнений, получим
В данном случае произведено прогнозирование по двум точкам значения показателя качества, измеренным в моменты времени t1 и t2. Такой прогноз состоятелен, если заранее известна тенденция к монотонному изменению показателя качества.
Рассмотрим более сложный пример с оценкой точности эмпирических формул, используемых для построения прогноза. Предположим, что мы имеем экспериментально полученные значения прогнозируемого параметра x(t) для моментов времени
t1,t2,…,tn
Требуется определить значение x(t) для момента времени tk+1.
Значения параметра x(t) для дискретных моментов времени сведем в табл. 2.1.
Таблица 2.1
| Значения x(t) | x(t1) | x(t2) | … | x(tk) | x(tk+1) |
| Дискретные моменты времени t | t1 | t2 | … | tn | tk+1 |
Предположим, что закон изменения параметра описывается полиномом, например второй степени, т. е.
В нашем случае имеется избыточность значений x(ti), так как k > 3, а для определения коэффициентов нужно всего три значения x(ti). Чтобы решить, какие значения x(t) следует взять из таблицы, рекомендуется поступить следующим образом. Сначала из таблицы берут три первых значения, затем — три вторых и т.д. Составляют системы уравнений для каждой тройки значений x(ti), например для первой

Решив систему уравнений, рассчитывают а(1), b(1), с(1). Затем, поступая аналогично предыдущему, определяют значения неизвестных для второй группы уравнений, т. е. а(2), b(2), с(2) и т. д.
Таким образом, будем иметь столько коэффициентов, сколько групп. Допустим, их было s, тогда x(t) можно подсчитать по любой тройке коэффициентов
Теперь выясним, какая группа из 5 наиболее подходяща. Оценку произведем по погрешностям, которые получаются при расчете по каждой из формул. Результаты сведем в табл. 2.2.
Таблица 2.2
| табличное | Формула (1) | Формула | |||
| (ti) | ξ | (ti) | ξ | ||
| x(t1) | x(1)(t1) | ξ11 | -- | x(s)(t1) | ξ(1)1 |
| x(tk) | x(1)(tk) | ξ1k | x(s)(tk) | ξ(s)k | |
| ∑ξi | ∑ξ(s)i |
Подсчитываем суммарные значения погрешности, полученные по каждой из формул:
Находим минимальное значение  . Воспользуемся той из формул, которая дает минимальное значение суммарной погрешности. Пусть в нашем случае это формула j. тогда
. Воспользуемся той из формул, которая дает минимальное значение суммарной погрешности. Пусть в нашем случае это формула j. тогда

Значение прогнозируемого параметра для времени tk+1 составит

Описанный метод прогнозирования является не единственным, однако он прост и позволяет получить удовлетворительные результаты. Этот метод называют методом средних.
Чтобы повысить точность, целесообразно увеличивать степень полинома.
Таким образом, с помощью метода средних по эмпирическим табличным значениям прогнозируемого параметра можно найти эмпирическую зависимость в виде полинома k -й степени (k = 1,..., n) а затем определить значение прогнозируемого показателя качества.
Здесь мы решаем две задачи: определяем вид эмпирической зависимости и находим значение прогнозируемого параметра.
Рассмотрим графический метод описания экспериментально полученных зависимостей показателя качества подходящими эмпирическими формулами. Этот метод удобен для описания эмпирических зависимостей показательными функциями (рис. 2.1).
Предположим, что получены экспериментальные значения параметра x(t) в некоторые дискретные моменты времени t1..., tk.
Сведем полученные значения х (ti) в табл. 2.3.
Таблица 2.3
| Значения показателя качества х(ti) | х(t1) | х(t2) | … | х(tk) | х(tk+1) |
| Моменты времени ti | t1 | t2 | … | tk | tk+1 |
Построим график дискретных значений x(ti) и оценим его качественно. Если исследуемая функция х(ti) не имеет особенностей, то, перейдя к непрерывному значению х(t), находим, что подходящей зависимостью для ее описания является x(t)=atb.
Логарифмируем показательную функцию

Перейдем к новым переменным, обозначив
 ,
,
тогда получим уравнение прямой. Построим ее в логарифмическом масштабе и проверим линейность Y = lga + bХ.
Чтобы определить неизвестные а и b, воспользуемся крайними значениями x(t1) и x(tk) из табл. 2.3. Составим систему уравнений
Имеем два уравнения и две неизвестные, следовательно, задача легко решается. Находим значение показателя качества в момент времени tk+1 x(tk+1)=atbk+1
Если x(tk+1) ≥ хд, то исследуемое изделие к моменту tk+1 будет исправным.
Удовлетворительные результаты при использовании графического метода получают при условии, что прогноз строится не более двух шагов вперед, т. е. для tk+2.
Рассмотрим операцию прогнозирования вероятности безотказной работы аппаратуры на основании статистических данных.
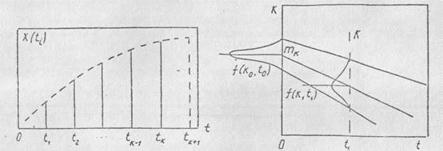
Рис. 2.1. График экспериментально полученных значений функции X(t)
Рис. 2.2. График изменения коэффициента усиления в функции времени
Возьмем для примера аналоговое устройство. Типичным представителем этих устройств является операционный усилитель.
В простейшем случае его основной информативный параметр коэффициент усиления K, характеризующий отношение выходной величины к входной, постоянен: K = Uвыx/Uвх, где Uвыx — выходной сигнал; Uвх — входной сигнал.
При наличии помех внутреннего и внешнего характера, например старения элементов, колебаний питающих напряжений, он может со временем изменяться. Следовательно, коэффициент усиления в общем случае является случайной функцией с математическим ожиданием mk. Факторы, вызывающие отклонение ΔK, многочисленны и имеют различную физическую природу, поэтому естественно предположить нормальность распределения отклонений ΔK (рис. 2.2).
Для любого технического устройства существуют допустимые изменения коэффициента усиления ±ΔK. Вероятность того, что коэффициент усиления не выйдет за допустимые значения, составляет

При нормальном распределении, учитывая симметричность плотности распределения и используя функции Лапласа, можно записать

Фактическая картина изменения коэффициента усиления во времени сложна, так как всегда присутствуют случайные дестабилизирующие факторы, связанные с износом, старением, изменением температуры, влажности и т. д.
В простейшем случае математическое ожидание коэффициента усиления описывается линейной функцией вида
где С — постоянный коэффициент старения.
Функция mk(t) изображена на рис. 2.2, где f(mk,t0), f(K1,t1)— плотности распределения в сечениях t0 и t1 соответственно.
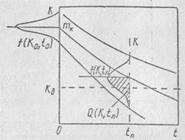
Рис. 2.3. График, поясняющий определение вероятности безотказной работы к моменту времени tn
В общем случае функция изменения математического ожидания может описываться полиномами более высших порядков, например второго или третьего: mk(t) = mк(0) — c1t — c2t2, mk(t) = mk(0) — c1t — c2t2 — c3t3, где с1, с2, c3 — некоторые коэффициенты, характеризующие скорость изменения или ускорения изменения К во временя.
По результатам эксплуатации установлено, что разброс коэффициента усиления со временем увеличивается, т. е. увеличивается его дисперсия.
При произвольном законе изменения математического ожидания коэффициента усиления вероятность его выхода за допустимое значение в момент времени tп (рис. 2.3):
Если известна плотность распределения коэффициента усиления в сечении tп, то нетрудно вычислить вероятность того, что коэффициент усиления не выйдет за допустимый предел Kд. Заметим, что при нелинейной функции mk(t) распределение плотности вероятности f(K,t) отлично от нормального в любом из сечений случайного процесса.
Задачу о нахождении вероятности недостижения в момент времени tп процессом значения Kд можно решить, используя плотность распределения случайного времени (рис. 2.4):
Если изделие характеризуется несколькими параметрами; то определяют вероятности недостижения этими параметрами допустимых значений и по минимальной полученной вероятности судят о наиболее опасном и критическом параметре.
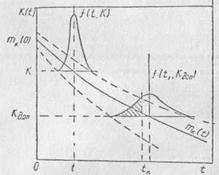
Рис. 2.4. График, поясняющий методику определения вероятности безотказной работы при изменении параметра К при эксплуатации
Каждый параметр, как правило, имеет присущий только ему закон плотности распределения параметра и его изменений во времени. Допустим, что объект характеризуется тремя параметрами а (t), b(t), c(t), которым определены допустимые значения ад, bд, сд (рис. 2.5). Найдем для некоторого момента времени tп вероятность безотказной работы объекта через вероятность отказа. Учитывая совместимость и предполагая независимость параметров, найдем

Следовательно, вероятность безотказной работы составит

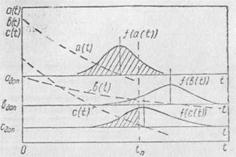
Рис. 2.5. График, поясняющий определение времени безотказной работы изделия по совокупности трех параметров
Подсчитывая вероятности безотказной работы по каждому из параметров, находят наиболее критичные параметры. Трудности при прогнозировании качества б данном случае связаны в основном с определением законов распределения параметров, которые могут быть получены лишь по результатам эксплуатации.
Если P(tп)≥ Pд(tп), то результаты прогнозирования вероятности безотказной работы до времени tп считаются положительными.
2.2. Прогнозирование состояний объекта на основе теории дискретных цепей Маркова
Основу технических средств современных сложных систем составляет электронная аппаратура. Так, ЭВМ — техническое средство вычислительных систем, систем автоматизации проектирования, систем управления сложными динамическими объектами и т. д. Рассмотрим задачу прогнозирования состояний объекта на примере вычислительной системы, являющейся сложным объединением однородных или разнородных технических устройств, которые могут находиться в различных состояниях, т. е. работать, быть в резерве, стоять на ремонте и т. д. Состояние вычислительного комплекса является случайным, зависящим от его загрузки или от состояния надежности. Последовательность состояний в функции времени можно рассматривать как случайный процесс. Оценить вероятности состояний вычислительного комплекса наиболее удобно с помощью теории марковских процессов (цепей).
Суть операции прогнозирования на основе теории дискретных цепей Маркова состоит в предсказании вероятности состояний объекта на некоторый наперед заданный шаг.
Постановка задачи заключается в формулировании условий операции, т. е. в описании объекта и определении цели. Исходя из поставленной задачи выбирают математическую модель. В данном случае применена модель марковских процессов с дискретными состояниями и дискретным временем [2].
Рассмотрим вопросы теории марковских процессов, которые будут использованы при решении операций прогнозирования состояний объекта.
Процесс является марковским, если для каждого момента времени t вероятность любого состояния в будущем (при t>t0) зависит только от ее состояния в настоящем, т. е. при t=t0 и не зависит от того, как протекал процесс в предыдущем, т. е. при t<t0
Широкое распространение получила теория процессов с дискретными состояниями. Это объясняется тем, что фактическое состояние объекта оценивается именно в дискретном плане (работает, не работает, ремонтируется, дежурит и т. д.).
Случайный процесс называют процессом с дискретным состоянием, если можно перечислить состояния системы Si одно за другим [2, 3]. Переход из одного состояния в другое происходит скачком.
Предположим, что вычислительная система состоит из двух вычислительных устройств. Возможны четыре состояния: S1 — оба устройства работают; S2 — одно отказало, а второе работает; S3 — второе отказало, а первое работает; S4 — оба устройства отказали.
Эти состояния отображены графом состояния (рис. 2.6).
Различают процесс с дискретным и непрерывным временем. Если переходы системы из одного состояния в другое происходят в строго определенные, заранее известные моменты времени, то такой процесс называют процессом с дискретным временем.
Если переход системы из одного состояния в другое происходит в заранее неизвестные моменты времени, то такой случайный процесс называют процессом с непрерывным временем.
Рассмотрим процесс с дискретным временем. Система может находиться в одном из состояний Si, S2,..., Sn. Переход в эти состояния осуществляется в дискретные моменты времени t1, t2, …, tn. Эти моменты времени составляют шаги 1, 2,..., n. Следовательно, последовательность состояний является функцией шагов, т. е. S1(l), S2(2),..., Sn(n). Заметим, что система при некотором i-м шаге может не переходить в другое состояние, а оставаться в прежнем. Каждое состояние оценивается вероятностью, например, Pi(k). Это означает, что вероятность i-го состояния наступает при k-м шаге. Переход из состояния в состояние происходит с некоторой вероятностью Pij. Это означает, что из состояния i в состояние j система переходит с вероятностью Pij.
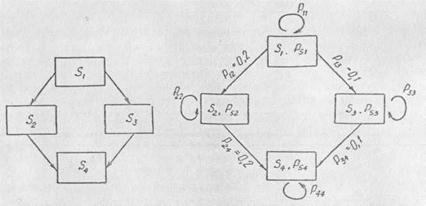
Рис. 2.6. Граф состояний системы
Рис. 2.7. Размеченный граф состояний
Всевозможные состояния при k-м шаге составляют полную группу, поэтому результирующая вероятность состояний равна единице при любом шаге.
Если известны вероятности переходов из одного состояния в другое и они не зависят от номера шага, то состояния системы составляют однородную марковскую цепь. Если система задержалась в некотором состоянии i, то вероятность неперехода записывается в виде Рii. Если вероятности переходов отшага к шагу изменяются, то такая цепь состояний называется неоднородной марковской цепью с дискретным временем.
Вероятность переходов для системы можно записать ввиде матрицы
Если некоторые вероятности переходов равны нулю, то переход системы из состояния в состояние невозможен. По главной Диагонали матрицы вероятностей переходов стоят вероятности непереходов, т. е. вероятности того, что система не перейдет в другое состояние, а задержится в прежнем состоянии.
Граф состояний, на котором приведены вероятности переходов, называют размеченным. Такой граф изображен на рис. 2.7. Для него справедливо

Эти уравнения используются для определения вероятностей неперехода системы из одного состояния в другое.
Имея размеченный граф состояний системы, найдем вероятности состояний для различных шагов.
Исходное состояние системы характеризуется вероятностями

При первом шаге вероятности состояний составляют

т. е. вероятности состояний равны вероятностям переходов.
При втором шаге
или
где i = 1, 2,.,., n.
Аналогично можно определить вероятность состояний для любого k-то шага
Эта формула может быть использована для определения номера шага, при котором достигается допустимое значение вероятности прогнозируемого состояния.
Алгоритм поиска номера шага для максимизируемых состояний записывается в виде

где ξ — некоторая величина, выбираемая из области допустимых отклонении значений вероятности прогнозируемых состояний.
Аналогично для минимизируемых состояний с той разницей, что допустимые значения вероятностей должны быть больше фактических.
Пример. Задан размеченный граф состояний (рис. 2.7), допустимое значение вероятности для третьего состояния Рз(k) = 0,2, ξ = 0,03. Требуется определить номер шага, при котором значение вероятности третьего состояния окажется в допустимых пределах.
Решение. Определим вероятности непереходов
Составим матрицу вероятностей переходов
Определим вероятности состояний для нулевого и первого шагов
при нулевом шаге 
при первом шаге
Вычислим вероятности состояний для второго шага
Проверяем:
Условие выполняется. Шаговый процесс продолжаем. При третьем шаге
Проверяем:
При проверке условия оказывается, что (Рiд(3) — Рiф(3)) < ξ, но больше нуля, следовательно, операция прогнозирования состояний объекта выполнена, число шагов равно трем.
На основании полученных результатов для наглядности решения построим график вероятностей состояний вычислительного комплекса (рис. 2.8).
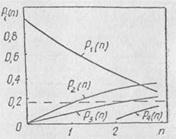
Рис. 2.8. График состояний вычислительного комплекса
В более общем случае вероятности состояний системы описываются неоднородной марковской цепью. В этом случае вероятности переходов Рij являются функциями шагов, т. е. зависят от номера шага. Тогда вероятность Si-гo состояния находится по формуле

Таким образом, для вычисления вероятностей состояний необходимо иметь заданную последовательность матрицу переходов

а также знать исходное состояние системы.








