 2014-02-02
2014-02-02 854
854Управляющие сопла (поворотные или неподвижные).
Управляющий двигатель подвижный (поворотный) или неподвижный.
Основной многокамерный двигатель работает в режиме форсирования- дросселирования тяги
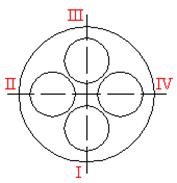
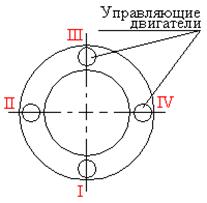 Рис.21
Рис.21
Рис.22
Газ из генератора подается на управляющие сопла и они поворачиваются.
1. Воздушные и газовые рули.
2. Воздушные рули в паре с основными двигателями, работающими в режиме форсирования –дросселирования.
Примечание:
 Все перечисленные органы управления могут создавать управляющие моменты рысканья и тангажа, однако не все из них пригодны для создания момента крена.Если на ракете имеется один поворотный двигатель или если силы создающие момент рысканья и тангажа направлены вдоль продольной оси ракеты, то в этом случае для создания момента крена необходимо применять специальные управляющие двигатели, тяга которых действует в поперечной плоскости ракеты.Величина сил, создаваемая органами управления зависит от перемещений этих органов (чаще всего угловых) или от секундного расхода топлива, если для создания управляющей силы используется рассогласование тяг основных двигателей.
Все перечисленные органы управления могут создавать управляющие моменты рысканья и тангажа, однако не все из них пригодны для создания момента крена.Если на ракете имеется один поворотный двигатель или если силы создающие момент рысканья и тангажа направлены вдоль продольной оси ракеты, то в этом случае для создания момента крена необходимо применять специальные управляющие двигатели, тяга которых действует в поперечной плоскости ракеты.Величина сил, создаваемая органами управления зависит от перемещений этих органов (чаще всего угловых) или от секундного расхода топлива, если для создания управляющей силы используется рассогласование тяг основных двигателей.
Рассмотрим определение сил и управляющих моментов, создаваемыми органами управления на примере ракеты с четырьмя управляющими двигателями.
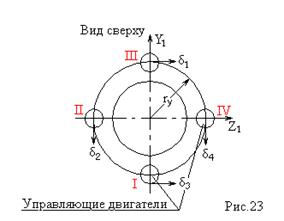
 Положительным отклонения управляющего двигателя будем считать его поворот против часовой стрелки, если смотреть со стороны соответствующей оси.
Положительным отклонения управляющего двигателя будем считать его поворот против часовой стрелки, если смотреть со стороны соответствующей оси.
Т.е. на рис.23 положительным отклонением двигателей 2 и 4 будет отклонение вниз, а для двигателей 1 и 3 – отклонение вправо. Будем считать, что тяги всех четырех управляющих двигателей равны по величине.

Запишем проекцию Р управляющих двигателей на оси OX1Y1Z1
где  - соответственно углы отклонения управляющих двигателей 1, 2, 3, 4.
- соответственно углы отклонения управляющих двигателей 1, 2, 3, 4.

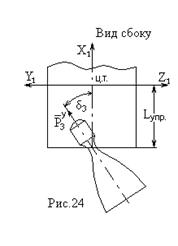
 - расстояние от носка ракеты до оси вращения управляющего двигателя.
- расстояние от носка ракеты до оси вращения управляющего двигателя.
 - расстояние от носка ракеты до центра тяжести ракеты.
- расстояние от носка ракеты до центра тяжести ракеты.








