 2014-02-02
2014-02-02 453
453Теория Автоматического управления (далее ТАУ) это наука, которая изучает процессы управления и проектирования автоматических систем, работающих по замкнутому циклу. Иначе говоря, она изучает любые системы с обратной связью.
Раздел 1.
Введение.
Лекция 1
Предметом являются Системы Автоматического Управления (далее САУ).
Примеры: терморегулятор, системы поддержания технологических параметров, электромеханические системы регулирования скорости и угла поворота,АПЧГ приёмника, регулирование рыночной экономики, и т.д.
|
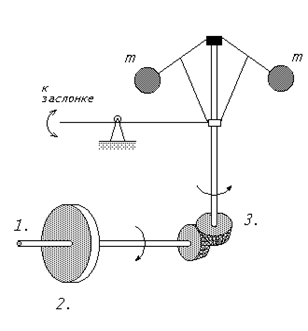
Первым примером САУ является регулятор Ползунова-Уатта (1764-65 г.г.), предназначенный для автоматического регулирования-поддержания давления в паровом котле.
1. Вал паровой машины
2. Маховик
3. Зубчатая передача
Задача сводится к поддержанию постоянной скорости вращения.
С принципами работы этого регулятора связана работа И.А. Вышнеградского “Регуляторы парового действия” (1876 г.), основными тезисами которой являются:
1. Увеличение массы шаров вредно влияет на устойчивость.
2. Уменьшение трения вредно влияет на устойчивость.
3. Уменьшение момента нагрузки маховика вредно влияет на устойчивость.
4. Уменьшение неравномерности хода вредно влияет на устойчивость.
Развитие техники: повышение мощности машин, совершенствование обработки метала, увеличения рабочей скорости, стремление уменьшить неравномерность хода, - приводило к ухудшению работы парового регулятора. Вышнеградский в своей работе объяснил, почему улучшение параметров машины ухудшает её работу. Инженерам в то время это было совершенно неясно и никак не укладывалось в стандартные схемы.
В 1892 г. А.М. Ляпунов написал работу “Общие задачи об устойчивости движения”, в которой обосновал общий подход к исследованию устойчивости движения, из этого результаты Вышнеградского вытекали, как частный случай.
Во второй половине ХХ века были решены многие новые задачи об устойчивости систем. В современном виде ТАУ была создана в середине 60-х годов ХХ века, но развитие вычислительной техники поставило новые задачи.
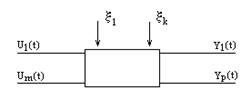
САУ состоит из двух основных частей: объекта управления (ОУ) и регулятора. Однако это разделение достаточно условное. ОУ представляет из себя “нечто”, в котором должны быть явно выражены одна или несколько входных и одна или несколько выходных величин. Так же на объект действуют помехи.
|
u(t)=(u1(t).....umt))T - входное, управляющее воздействие
y(t)=(y1(t).....yn(t))T - выходное сигнал, состояние объекта
x(t)=(x1(t).....xk(t))T - вектор помех
Для поддержания заданного режима функционирования объекта, который выражается в заданном поведении выходных величин y, осуществляется управление входными величинами u, в соответствии с некоторым алгоритмом управления, построенным в соответствии с принципами управления.
Принципы управления (регулирования):
      Р О yф u y Р О yф u y
|
1. Принцип разомкнутого регулирования. x
Иначе говоря, принцип планового управления. Работает достаточно успешно при наличии двух условий:
а. Достаточно информации о свойствах объекта и неизменности этих свойств в процессе работы.
б. Незначительность или полное отсутствие помех.








