 2014-02-02
2014-02-02 1884
1884Предложен Чикалевым (1874 г.)
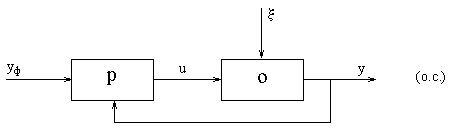 |
Этот принцип является наиболее общим, но и наиболее дорогим.
“Обратная связь”
 |
Канал обратной связи является наиболее уязвимым местом.
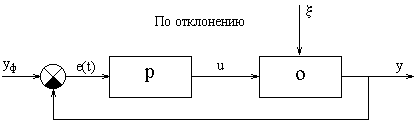
e(t)=yф(t)-y(t)
Если задача заключается в управлении объектом при наличии возмущающих воздействий, неточности задания математической модели объекта, погрешности измерений и повышенных требованиях к точности, то принцип управления по отклонению является наиболее совершенным.
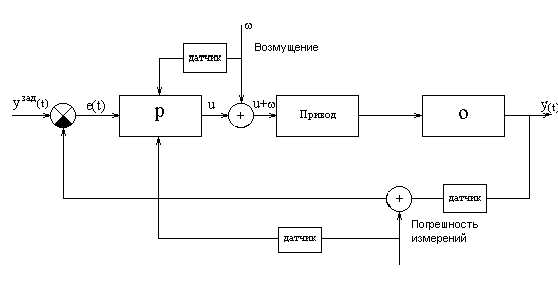 |
Это- модель электромеханической системы, содержащей привод, объект, датчики, регулятор и формирователь (задатчик) желаемого поведения выходного сигнала Y(t)
В этой модели САУ считается, что помехи действует линейно, т.е. прибавляются к сигналу.
К подобному виду часто можно привести типовые САУ, причём не только электромеханические, но и любой другой природы.
Именно этот факт универсальности методов автоматического управления для систем любой природы делает ТУ настоящей наукой, имеющей универсальное применение. Её методы одинаково подходят и в электромеханике, и в теории связи, и при описании и исследовании биологических или экономических систем.
Различают САУ и по задачам управления:
Обратимся к виду задающего воздействия (“уставки”, задатчика) yзад(t).
Это – желаемое поведение системы, желаемый алгоритм функционирования. От вида и способа формирования этого сигнала в значительной степени зависит способ построения регулятора.
В зависимости от вида Yзад(t) принято классифицировать САУ по
задачам управления:
а) Системы стабилизации, отличаются тем, что yзад = const.
б) Системы программного управления. yзад(t) = yзад (t) - является функцией времени и заранее известна.
в) Системы следящие. yзад (t) - заранее неизвестно.
Отметим, что эти задачи являются усложняющимися, в самом деле, всегда можно считать, что yзад = const является частным случаем известной функции. Также очевидно, что управлять системой с заранее неизвестным yзад (t) сложнее, чем системой с заранее известным законом функционирования.
Типичным примером системы стабилизации может служить контур поддержания постоянной температуры в помещении (обратите внимание на наличие в системе помех в виде изменяющихся условий в помещении- входят и выходят люди и т.п.!)
Ещё одним примером может служить система АПЧГ – автоматической подстройки частоты гетеродина приёмника.
Примером САУ программного управления является система поддержания заданного технологического режима, например, закона нагрева подложек микросхем, когда известна требуемая температурная кривая.
Замечание: не следует путать принцип программного управления и систему программного управления.
Наконец, примером следящей системы может являться любая система дистанционного управления перемещением, например, робот-манипулятор, управляемый специальным “джойстиком”. В этом случае объект должет точно воспроизвести любые заранее неизвестные перемещения, притом, в условиях помех.
Принято считать, что современная экономика развивается по принципу обратной связи, обеспечивающей в данном случае устойчивость системы вцелом при изменяющихся внешних условиях (природа).Следует, однако, отметить, что в этом случае не просто сформулировать задачу управления. Более точно такие системы описываются, как системы оптимальные, когда в явном виде представлен некоторый критерий выгоды, и задача заключается в его максимизации.

