 2014-02-02
2014-02-02 529
529Положения, лежащие в основе линеаризации.
Линеаризация заключается в переходе к линейному дифференциальному уравнению, переменные которого являются отклонениями от некоторого номинального режима, удовлетворяющего уравнению (**).
Вычислим дифференциал F, введя предварительно следующие обозначения:
Z = (y¢, y¢¢,... y(n))
U = (u¢, u¢¢,... u(m))
F(Z,U)=0 (**)
Пусть Zн и Uн - номинальная траектория, удовлетворяющая (**)

т.к. траектория номинальная:
 |
 (2)
(2)
- линеаризованное уравнение.
При этом  и
и  - коэффициенты ряда Тейлора.
- коэффициенты ряда Тейлора.
Введем: x = y-yн
и u = u-uн

 (3)
(3)
Так как все частные производные представляют из себя либо постоянные матрицы, либо, в крайнем, случае матрицы зависящие только от времени, то полученное уравнение (3) есть либо система линейных дифференциальных уравнений с постоянными коэффициентами, относительно отклонений x и u, либо система с переменными коэффициентами. Постоянность или переменность зависит от номинальной траектории. В частности, в системах стабилизации, где номинальные траектории - константы, получаются постоянные матрицы.
Таким образом, перейдя к уравнениям в отклонениях, мы получаем систему линейных дифференциальных уравнений, которую рассматриваем относительно выходной величины, т.е. порядок этой системы линейных дифференциальных уравнений равен n по порядку производной при x.
Дифференцирование же входного сигнала u рассматривается не как дифференциальное уравнение относительно u, а как операция с известным входным сигналом.
Соберем все коэффициенты дифференциальных уравнений в матрицы и получим окончательно следующую матричную систему:
A0(t)x + A1(t)x+…+An(t)x=B0(t)U+…+Bm(t)U
Если удаётся удачно выбрать номинальную траекторию (это зависит не только от мастерства исследователя, но и от самой задачи), матрицы Аi и Bi становятся постоянными. И для такой системы линейных дифференциальных уравнений с постоянными коэффициентами можно получить до конца точное решение и полностью его исследовать. В случае постоянных коэффициентов система называется стационарной.
Чаще всего оказывается, что входные и выходные величины объекта - скалярные функции u b x:
a0x(n)+…+anx=b0u(m)+…+bmu (4)
(4) – описывает стационарный объект с одним входом и одним выходом.
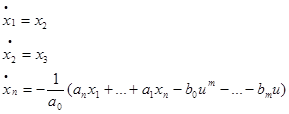
Переход от дифференциального уравнения порядка n к системе из n -дифференциальных уравнений 1-го порядка
Вводим дополнительные переменные (x1……xn), равные производным х.
x(n)= -1/a0 (a1x(n-1)+…anx-b0u(m)-…bmu)
Вводим: х=cт *(x1……xn), здесь с-вектор констант, позволяющий вычислить х из
|
вектора (x1……xn)
(5)
Начальные условия для x(t) переходят в начальные условия для (x1……xn).
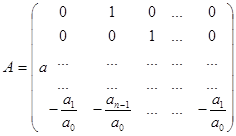
Получившаяся система дифференциальных уравнений (5) может быть записана в матричном виде следующим образом:
введем вектор
|
И (5) выражается:
|
Тогда:
Отметим, что настоящий выход объекта равен х1, то есть можно записать, что при с=(1 0 0 0 …0) х1= ст* (х1 …….х n).
|
|
|
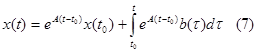
Решение системы уравнений (6)всегда может быть записано в следующем виде:
Где первое слагаемое – решение однородного уравнения, второе – неоднородного.
Формула (7) справедлива вне зависимости от порядка исходного дифференциального уравнения.
|
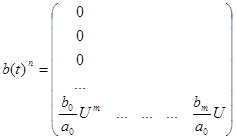
Заключение: В правую часть уравнения (6) входят производные от управляющего воздействия. Можно показать, что от этих производных можно избавиться. Они будут вычисляться “автоматически” в процессе решения системы уравнений,и выглядит это след. образом: нужно вместо b(t) взять
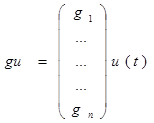
Коэффициенты g1 и gn вычисляем по следующей формуле:
g0=0
|
Это рекуррентная формула в том смысле, что g вычисляется последовательно.
Пример и геометрическая интерпретация линеаризации.
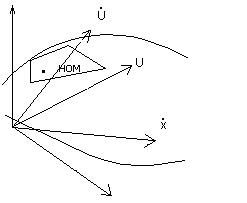
|
|
Есть не что иное, как уравнение поверхности в пространстве. Координат столько, сколько аргументов у функции. Номинальная траектория есть просто точка на поверхности, линеаризованное уравнение (2) – уравнение касательной плоскости








