 2014-02-02
2014-02-02 1522
1522Имеются формулы, позволяющие получить передаточную функцию оптимального фильтра Винера, наилучшим образом решающую задачу.
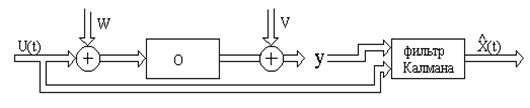
Фильтр Калмана.
Постановка задачи: Имеется многомерная нестационарная линейная система, в которой имеются помехи W – в канале управления и V – в канале измерения. Кроме того, состояние объекта непосредственно недоступно измерению, а лишь косвенно с помехой V.
 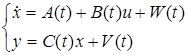 - уравнения измерения - уравнения измерения |
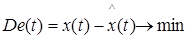 |
Построить фильтр, чтобы
Требуем, таким образом, минимальной дисперсии ошибки фильтрации.
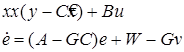
Предположим, что V и W (помехи) являются “белыми шумами” с нулевым математическим ожиданием, с заданными интенсивностями - дисперсиями и независимы между собой. Использовав подход похожий на построение наблюдателя, будем искать уравнение фильтра в следующем виде:
 |
 |
Рассмотрев неизвестную матрицу G как параметр оптимизации, а дисперсию ошибки как критерий оптимизации и решив эту задачу оптимизации, получаем следующее выражение:
 |
R - матрица интенсивности шума.
 |
Q - интенсивность шума W.
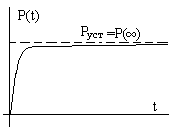
Таким образом оптимальный фильтр Калмана, даже при постоянных параметрах объекта, является системой с переменными коэффициентами. Поэтому, его затруднительно реализовать. Однако P(t) обычно быстро стремится к установившемуся значению и квази-оптимальный фильтр получается из оптимального, если мы выбираем Gопт=Gуст из условия: dPуст /dt =0, что приводит к алгебраическому матричному уравнению для Pуст.
Фильтр Винера как раз соответствует стационарному установившемуся режиму работы фильтра Калмана.
Теорема разделения в задаче фильтрации.

