 2014-02-02
2014-02-02 821
821т.к. плотность в разные моменты разная то и M(t) разное.
 |
- дисперсия.
М(t) и D(t) характеризуют значение x(t) в отдельные моменты времени.
 |
 |
Отметим, что K(t,t), т.е. t1=t2 это есть дисперсия в момент времени Dx(t). Корреляционная функция описывает статистическую связь значений процессов в разные моменты времени.
Стационарным случайным процессом называется такой случайный процесс, для которого корреляционная функция, на самом деле, зависит не от абсолютных значений t1 и t2, а только от их разности.
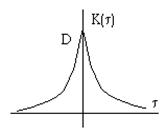 |
Для стационарных случайных процессов: K(t1 ,t2) = K(t1 -t2) = K(t).
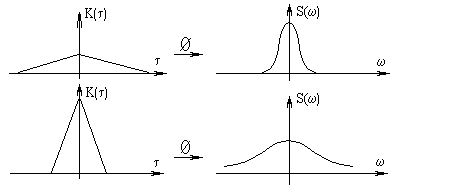
Типичный график корреляционной функции.
Для стационарного процесса математическое ожидание и дисперсия также не зависят от времени.
Стационарный случайный процесс для САУ не меняет своих статистических характеристик за время жизни системы.
  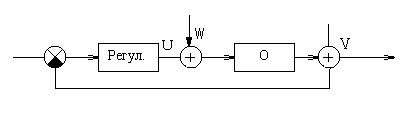 |
Такие функции как M, D, K могут быть получены экспериментально. Будем считать, что в САУ помехи могут быть в двух основных местах: в канале управления и в измерителе.
W - помеха в канале управления.
V - помеха в канале измерения
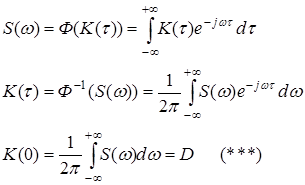
Спектральная плотность S(w) стационарного случайного процесса, есть интеграл Фурье:
 |
Аналогично можно дать определение взаимной спектральной плотности двух процессо X и Y:
 |
из (***) видно, что дисперсия есть суммарная энергия случайного процесса. Чем больше дисперсия, тем больше энергия этого (“вредного”) сигнала.
 - интенсивность, или среднеквадратическое отклонение.
- интенсивность, или среднеквадратическое отклонение.
Если рассмотреть сигнал с бесконечным равномерным спектром, то ему будет соответствовать корреляционная функция в виде d-функции. Т.е.:
S(w) = const
K(t) = (const/2p)*d(t)
D=K(0)=¥
Эти три уравнения есть “белый шум” с интенсивностью const/2p.
 |
Реально “белый шум” всегда ограничивается по полосе пропускания системой и поэтому бесконечная дисперсия физического значения здесь не имеет. Однако, также ясно, что этот “белый шум” является очень тяжелой помехой. Если уметь бороться с такой помехой, то с остальными должно быть проще.
В общем случае, на входе некоторого блока с передаточной функцией W(p):
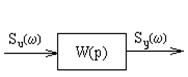 |
Sy(w)=|W(j w)|2 * Su(w)
В частном случае для “белого шума” с единой спектральной плоскостью:
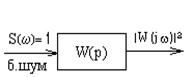 |
“Белый шум” прошедший через линейную систему называют “розовым шумом”.
Фильтр Винера (Норберт Винер).
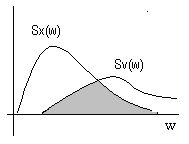
Задача - построить устройство-фильтр, максимально возможно подавляющее помеху с известной спектральной плоскостью, предполагая что полезный сигнал также случайный сигнал, с известной спектральной плоскостью.
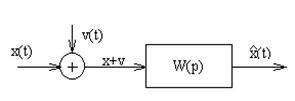 |
 - ошибка фильтрации
- ошибка фильтрации
Задача - определить W(p), чтобы D(e) -> min, при известных характеристиках x(t) и v(t).
Обычно известны или корреляционные функции, или спектральные плоскости.
Также оказывается необходимым знать взаимную корреляционную функцию или взаимную спектральную плотность полезного сигнала и шума. Важным является стационарность случайных сигналов, отсутствие дополнительной информации о сигналах при наличии которых фильтрацию можно улучшить и известные статистические характеристики сигналов
 |
Более общей является постановка задачи по Калману. Эта постановка более общая по причинам:
1. Процессы могут быть нестационарными.
2. Уравнения объекта могут быть нестационарные, т.е. вообще не описываться передаточной функцией.
3. Все процессы могут быть векторными.








