 2014-02-02
2014-02-02 2771
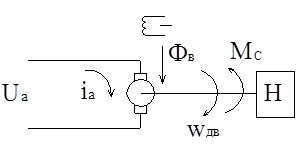
2771Система автоматического регулирования (САР) скорости вращения двигателя постоянного тока с независимым возбуждением.
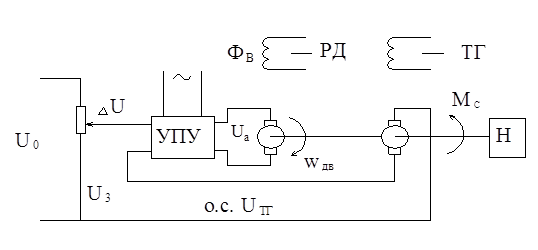 |
U0 – напряжение, поступающее на вход потенциометра.
UЗ – напряжение, задающее скорость вращения двигателя.
РД – реверсивный двигатель.
ТГ – тахогенератор (устройство для измерения скорости вращения двигателя).
УПУ – усилительно-преобразовательное устройство.
Н – нагрузка или производственный механизм, скорость которого надо поддерживать постоянной.
Uа – напряжение на якорной обмотке двигателя.
 - скорость вращения двигателя.
- скорость вращения двигателя.
UТГ – напряжение на выходе ТГ.
МС – момент сопротивления на валу двигателя.
ФВ – ЭМ поток возбуждения двигателя.
РД – объект управления.
УПУ+ТГ=АР – автоматический регулятор.
 - задающее воздействие.
- задающее воздействие.
 - регулируемая величина.
- регулируемая величина.
МС – возникающее воздействие.
 - ошибка
- ошибка
UТГ – подается через отрицательую обратную связь.
Цель системы: Стабилизация скорости вращения двигателя.
Рассмотрим момент времени t0.
Все сигналы постоянны.: 
|
|
|
Теперь рассмотрим момент времени t1.
Сигналы изменяются:
МС-возрастает скачком (изменяется нагрузка). Следовательно: - падает, UТГ – падает,  - возрастает, Uа – возрастает, следовательно возрастет , т.е осуществляется регулировка.
- возрастает, Uа – возрастает, следовательно возрастет , т.е осуществляется регулировка.

1. «И» закон регулирования.
Для момента времени t2:
Допустим, что  - возрастает.
- возрастает.
Единственная точка стабилизации:
Для «И»: 
Определение: Астатической называется система, у которой выходнаявеличина не зависит от возмущения (статическая ошибка равна нулю).









2. Пропорциональный закон регулирования.

Предположим, что  ошибка:
ошибка:

 , наше предположение не верно, т.е
, наше предположение не верно, т.е 








Определение: Статической называется система автоматического регулирования (САР), у которой выходная величина уменьшается при увеличении возмущения. Статическая ошибка в такой системе на равна нулю.
Статические характеристики статической САР.
Определение: Статические характеристики - характеристики, полученные в положении равновесия.
Статические характеристики двигателя постоянного тока.
 |
Ua – напряжение на якорной обмотке двигателя.
Ia – ток в якорной цепи.
ФВ – ЭМ. поток возбуждения.
- скорость вращения двигателя.
МС – момент сопротивления на валу.
При взаимодействии тока ia и потока ФВ на валу возникает момент вращения двигателя МДВ.

ФВ = const, если реакцией якоря можно пренебречь, то 
1) Если МС = 0, то 






2) Ua – const.













Статическая характеристика двигателя постоянного тока: 
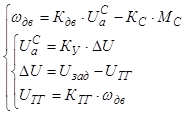
{по поводу степени «с» в лекциях написано, что она статическая и формируется системой}






К – коэффициент усиления разомкнутой системы.

Уравнения статики статической системы.
Найдем статическую ошибку.
|
|
|

Статическая ошибка статической системы
Индексы: у - по управляющему воздействию, В – по возмущающему воздействию.
Что дает отрицательная обратная связь (замыкание системы)?
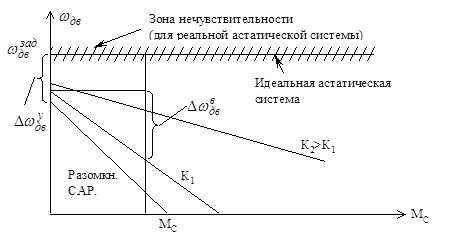
Момент изменяется от 0 до МС  - разомкнутая система,
- разомкнутая система,  - изменение скорости двигателя.
- изменение скорости двигателя.
Для замкнутых систем скорость изменилась:
Вывод: При замыкании системы статическая ошибка по возмущению уменьшается в (1+К) раз.
Построим статические характеристики по выражению (**).
 |
6. Линеаризация. Вывод уравнений генератора постоянного тока с рабочей точкой в нелинейной зоне.
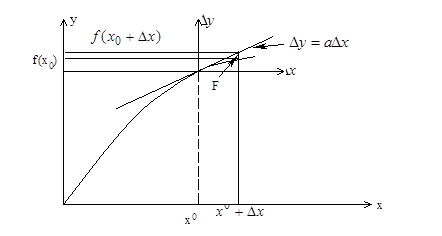 |
Линеаризация – замена нелинейных уравнений на линейные, проводится в пределах заданной точности и используется для исследования линейных систем.
Рассмотрим точку х0 вблизи которой мы хотим получить наше уравнение.
Зададим приращение 
Разложение в ряд Тейлора.



Отбрасываем члены F.
Получаем линеаризованное ур-е.


Линеаризованное ур-е в приращениях:
Переносим начало координат из точки 0 в точку 0’.

F – ошибка линеаризации.

