 2014-02-02
2014-02-02 761
761Динамика систем управления
Изучает поведение систем автоматического управления в переходных режимах.
Основным способом описания переходных режимов является аналитический способ, в основе которого лежит уравнение динамики:

Уравнение (3.1) – частный случай уравнения динамики (3.2) для условий когда в системе отсутствуют изменения, т.е. все производные по времени равны 0.
1) Графический
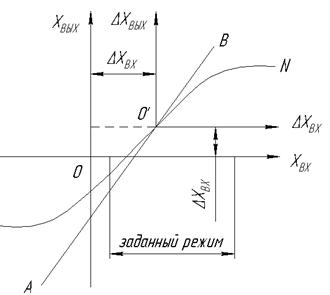
Главным требованием, предопределяющим возможность линеаризации системы является малость отклонений фактических значений выходных сигналов системы от расчетных, которые получены после линеаризации.
Появляется новая система координат и движение системы рассматривается в отклонениях (уравнение движения системы составляется в отклонениях).

Выражение (3.3) представляет собой аналитическую форму записи уравнения движения линеаризованной системы. Однако для упрощения записи знак приращения Δ обычно опускают, а уравнение (3.3) при этом записывают в виде
Аналитическая форма представления уравнения динамики (3.4).
Таким образом переходные режимы линейных системах автоматического управления описываются аналитически дифференциальными уравнениями часто достаточно высокого порядка.








