 2014-02-02
2014-02-02 18159
18159Способы движения машинно-тракторных агрегат (Кинематика агрегатов)
Машинно-тракторный агрегат в процессе работы перемещается по полю, проходя за смену значительные расстояния, измеряемые часто многими десятками километров. Пройденный агрегатом путь состоит из рабочих ходов и холостых поворотов с выключенными рабочими органами. При этом желательно, чтобы холостой путь агрегата и соответствующие потери времени смены, а также непроизводительный расход топлива были как можно меньше.
Под способом движения МТА подразумевается закономерность его перемещения по полю в процессе работы. Эта закономерность в основном определяется его геометрическими характеристиками: формой траектории; радиусом и видом поворота и т. д.
Подготовка полей в зависимости от выбранного способа движения предусматривает комплекс операций по разбивке поля на загоны требуемой формы и размера, обеспечивающие высокое качество технологического процесса и высокую производительность при возможно меньших затратах ресурсов.
Основной задачей кинематики агрегатов является обоснование методов выбора эффективных способов движения МТА и подготовки полей с учетом следующих основных требований:
- высокое качество выполняемой работы;
- высокая производительность при возможно меньших затратах топлива и других ресурсов на единицу выполненной работы;
- обеспечение безопасных условий работы для механизаторов;
- наименьшее отрицательное воздействие на окружающую среду (почву, культурные растения и т. д.).
Основные кинематические характеристики МТА зависят от конструктивных особенностей трактора, сцепки и рабочих машин. К таким характеристикам агрегата относятся: кинематический центр; кинематическая длина; длина выезда; кинематическая ширина; радиус и центр поворота; ширина колеи и продольная база трактора; ширина захвата.
Под кинематическим центром ц агрегата подразумевается условная геометрическая точка на плоскости движения (поверхности поля), траектория которой рассматривается как траектория МТА в процессе движения по полю. Такое упрощение приемлемо в связи с тем, что геометрические размеры МТА неизмеримо меньше размеров обрабатываемого участка или загона. Расположение центра агрегата ц зависит от типа трактора.
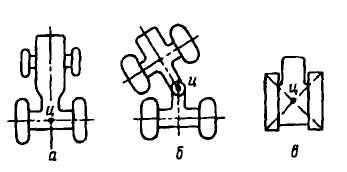
Рис. 1. Основные схемы расположения центра агрегата
Для агрегатов, составляемых на базе колесных тракторов с жесткой рамой, точка ц определяется как проекция середины задней ведущей оси трактора на плоскость движения (рис. 1 а). У агрегатов с тракторами, имеющими шарнирно-сочлененную раму, за центр агрегата принимается проекция на плоскость движения центра шарнира (рис. 1 б). Для МТА с гусеничными тракторами центр агрегата соответствует проекции на плоскость движения точки пересечения диагоналей, проведенных через наружные края гусениц (рис. 1 в).
 Кинематической длиной агрегата lк называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении. Как видно из рис. 2 а, кинематическая длина lк агрегата складывается из кинематических длин lт трактора, lс сцепки и lм рабочей машины, т. е.
Кинематической длиной агрегата lк называется проекция расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машин при прямолинейном движении. Как видно из рис. 2 а, кинематическая длина lк агрегата складывается из кинематических длин lт трактора, lс сцепки и lм рабочей машины, т. е.
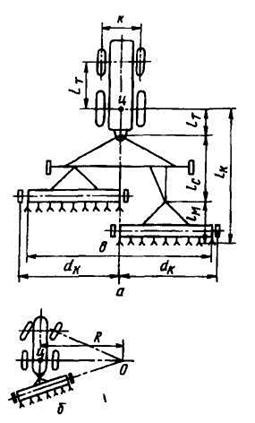
 Длина выезда агрегата (е) определяется как расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) по ходу МТА перед началом и в конце поворота. Такое перемещение МТА необходимо для вывода рабочих органов последнего ряда машин на контрольную линию. По значению е пропорциональна кинематической длине агрегата, т. е.
Длина выезда агрегата (е) определяется как расстояние, на которое перемещается центр агрегата от контрольной линии (границы обрабатываемого участка) по ходу МТА перед началом и в конце поворота. Такое перемещение МТА необходимо для вывода рабочих органов последнего ряда машин на контрольную линию. По значению е пропорциональна кинематической длине агрегата, т. е.
Значения ае для МТА соответствующих типов приведены в справочной литературе по машиноиспользованию.
Рис.2 - Основные кинематические характеристики агрегата
Кинематическая ширина агрегата dK равна расстоянию между проекциями на плоскость движения продольной оси трактора и параллельной линии, проходящей через наиболее удаленную точку агрегата. Различают dK вправо и влево от продольной оси трактора. Указанные расстояния используют при расчете ширины поворотной полосы загона.
Радиус поворота агрегата R (рис. 2 б) определяется как расстояние от центра агрегата ц до центра поворота О. Обычно при повороте МТА центр агрегата ц перемещается не по окружности, а по дуге более сложной формы.
Соответственно изменяется как значение радиуса поворота R, так и расположение мгновенного центра поворота О на плоскости движения. При эксплуатационных расчетах принимают среднее значение радиуса поворота R с учетом возможной поправки на скорость МТА.
На рис. 2 а дополнительно показаны такие кинематические показатели агрегата, как ширина колеи k и продольная база Lт трактора, а также ширина захвата МТА. При кинематических расчетах значения рабочей В и конструктивной Вк ширины захвата МТА принимают одинаковыми.
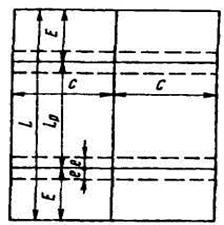
Основные кинематические характеристики рабочего участка:
- общая L и рабочая Lp длины гона;
- ширина С загона;
- ширина Е поворотной полосы;
- длина е выезда (рис. 3).
Под рабочим участком подразумевается часть поля, отведенная для выполнения определенной сельскохозяйственной операции. Загон представляет собой часть рабочего участка прямоугольной формы, отведенную для работы на ней одного или группы агрегатов.
Рис. 3. Основные кинематические характеристики рабочего участка
 Длина L гона часто определяется размерами поля, а ширина С загона — шириной В захвата и способом движения МТА. Ширина Е поворотной полосы зависит от ширины В захвата и условий безопасного поворота агрегата.
Длина L гона часто определяется размерами поля, а ширина С загона — шириной В захвата и способом движения МТА. Ширина Е поворотной полосы зависит от ширины В захвата и условий безопасного поворота агрегата.
Рабочая длина гона равна:
По соображениям удобства в последующем в качестве расчетной длины гона используется общая длина гона L.
Такое упрощение мало влияет на конечные результаты расчетов. От контрольных линий (рис. 3) в обе стороны на расстоянии длины е выезда агрегата прокладывают линии выключения и включения рабочих органов. Подготовка рабочего участка в полном соответствии с рисунком крайне важна для качественной, высокопроизводительной и экономичной работы машинно-тракторных агрегатов.








