 2014-02-24
2014-02-24 479
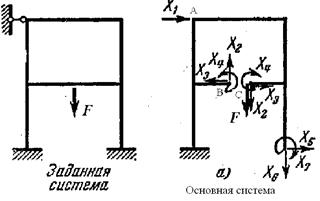
479После выбора основной системы необходимо ввести вместо связей неизвестные силовые факторы. В тех сечениях, где запрещены линейные перемещения, вводятся силы. Там, где запрещены угловые смещения, вводятся моменты.
Основная система должна быть кинематически неизменяемой.
Система, освобожденная от дополнительных связей - основная система, становится статически определимой.
Неизвестные силы, поэтому метод сил.
Неизвестные силовые факторы (силы и моменты) обозначаются Xi, где i -номер неизвестного. Для внутренних связей силы Xi-являются взаимными.
Канонические уравнения метода сил.
Рассмотрим вариант основной системы с семью дополнительными связями. 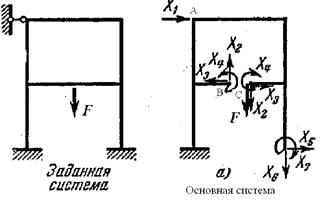
Обозначим δ ik – взаимное смещение точек системы. i -направление перемещения, k- сила, вызвавшая это перемещение.
В точке А отброшена опора, следовательно горизонтальное перемещение равно нулю или δ1[x1 x2 …F] =0. Индекс 1 – перемещение в направлении X1, индекс
[ X 1,X2, …F ] – перемещения определяемые суммой всех сил, как заданных, так и неизвестных.
|
|
|
Аналогично δ2[X1,X2…F ] =0; δ3 [X1,X2…F] = 0 и т.д.
δ2- вертикальное смещение точки В относительно С, δ3 – горизонтальное взаимное смещение тех же точек, δ4 – взаимное угловое смещение сечений В и С и т.д.
Пользуясь принципом независимости действия сил, раскроем δ i[X1,X2…F]:

И т.д. по аналогии.
Каждое слагаемое δ iXk обозначает перемещение в направлении силы с первым индексом под действием силы, стоящей во втором индексе.
Т.к. каждое перемещение пропорционально соответствующей силе, то можно записать:
δ iXk = δ ik Xk
Перемещения δ1F, δ2F и т.д. оставим неизменными т.к. под индексом F будем понимать не просто силу F, а систему внешних сил. Тогда уравнения примут вид: 
Или δ ik Xk + δ i F = 0, где i=1,2,…n. k = 1,2…n.








