 2014-02-24
2014-02-24 1669
1669Классификация кинематических пар и цепей
Кинематические пары могут быть:
поступательными и вращательными,
низшими и высшими,
одноподвижными и многоподвижными (I….V класса).
Поступательными называется пары, допускающие только поступательное движение звеньев, вращательными – пары, допускающие только вращательное движение вокруг некоторой оси.
К низшим парам относятся пары, у которых звенья касаются между собой по всей поверхности. К ним относятся поступательные и вращательные кинематические пары.
К высшим относятся пары, звенья которых соприкасаются друг другом в точке или по линии. К ним относятся фрикционные, кулачковые зубчатые, храповые и мальтийские пары.
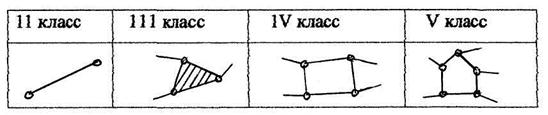
В зависимости от числа условий связи, все кинематические пары делятся на классы. Они могут быть:
- пятиподвижными (сферич.), S=1, I класс,
- четырехподвижными (цилиндр), S=2, II класс,
- трехподвижными (сферич.), S=3, III класс,
- двухподвижными (цилиндр), S=4, IV класс,
- одноподвижная (поступат. и вращат.), S=5, V класс.
При нулевой степени свободы кинематической цепи ни одно из звеньев не может двигаться относительно неподвижного звена (стойки) и кинематическая цепь превращается в ферму.
Кинематические цепи могут быть простыми и сложными.
У простой кинематической цепи каждое звено входит не более чем в две кинематические пары, у сложной пары каждое звено входит более чем в 2 кинематические пары (рисунок 1.2).
 Простая КП Сложные КП
Простая КП Сложные КП
Рисунок 1.2 − Виды кинематических цепей
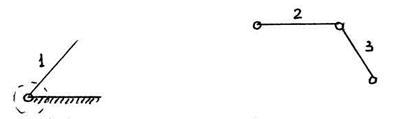
Простые и сложные кинематические цепи, в свою очередь, делятся на незамкнутые и замкнутые (рисунок 1.3).
Рисунок 1.3 − Кинематические цепи
а − простая (незамкнутая); б – сложная незамкнутая; в – простая замкнутая;
1, 2,….6 – звенья; А, В, ….., L − кинематические пары.
Число степеней свободы кинематической пары относительно неподвижного звена называется подвижностью кинематической цепи(механизма).
Подвижность пространственной цепи (механизма) определяется по формуле Сомова-Малышева
W=6n-5p5-4p4-3p3-2p2-p1, (1.3) где n-число подвижных звеньев,
p1…p5 – число пар I…V классов.
Подвижность плоского механизма уменьшается на 3 и рассчитывается по формуле Чебышева
W=3n - 2p5 - p4 (1.4)
При изучении структуры и кинематики плоских механизмов во многих случаях удобно заменять высшие пары механизмов низшими. При этом подвижность механизма не должна изменяться. Полученный механизм называется заменяющим (рисунок 1.4)
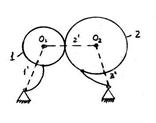
Рисунок 1.4 − Схема механизма с высшей парой
Представляемый подвижными звеньями 1,2 фрикционный механизм состоит из высшей кинематической пары 1,2 IV класса и двух низших пар 01 и 02 V класса и стойки, т.е. n=2, P5=2, P4=1. Подвижность такого механизма составляет
W=3n - 2p - p4=3 ·2 –2 ·2 -1=1, (1.5)
Заменяющий механизм представлен подвижными звеньями 1´2´3´ и стойками 0. Кинематические пары 01´; 1´,2´ 2´3´, 3´0 является вращательными парами пятого класса. Имеем n=3, p5=4, и p4=0
Тогда подвижность заменяющего механизма будет равна
W=3n - 2p5 - p4=3 ·3 –2 ·4 - 0=1, (1.6)
Таким образом, после замены высшей пары низшей подвижность механизма не изменилась, следовательно, замена выполнена правильно.
В современном машиностроении наиболее широкое распространение получили плоские механизмы, звенья которых входят в пары IV и V класса
Задачей структурного анализа является построение структурной схемы, расчленение ее структурные единицы и определение класса групп Ассура и механизма в целом.
Любой механизм имеет одно неподвижное звено «стойку», начальное звено и присоединенные к ним цепи звеньев. Если механизм имеет одно начальное звено, степень его подвижности равна 1, если два начальных звена, подвижность равна 2 и т.д. Расчеты по формуле Чебышева дает те же результаты. Следовательно, присоединение к механизму последующих кинематических пар не меняет его подвижность, а значит, подвижность присоединенных пар должна быть равна 0.
Кинематическая цепь с нулевой степенью подвижности (свободы) относительно внешних кинематических пар, не распадающаяся на более простые цепи, называется группой Ассура (Wгр=0).
Назовем условно начальное звено и стойку, образующие кинематическую пару пятого класса, механизмом первого класса. Тогда любой механизм состоит из механизма первого класса и присоединенных к нему групп Ассура.
Порядок группы Ассура определяется числом элементов звеньев, которыми группа присоединяется к основному механизму, а класс группы Ассура – наивысшим классом входящих в него контуров (таблица 1.1).
Таблица 1.1 − Классы и виды контуров
Класс всего механизма определяется наивысшим классом группы Ассура, входящей в данный механизм.
Структурный анализ механизма включает в себя:
1. Построение кинематической схемы механизма.
2. Нумерацию звеньев и обозначение буквами кинематических пар.
3. Подсчет подвижных звеньев и кинематических пар различного класса.
4. Определение подвижности механизма.
5. Построение структурной схемы механизма.
6. Расчленение механизма на структурные единицы.
7. Определение класса структурных единиц.
8. Определение класса всего механизма в целом.
Пример № 1. Выполнить структурный анализ рычажного механизма (рисунок 1.5).
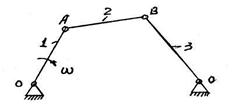
Рисунок 1.5 − Схема рычажного механизма
Решение:
1. Обозначаем звенья цифрами (неподвижные 0, подвижные 1,2,3), а кинематические пары буквами (0, А, Б, 0).
2. Подсчитываем количество подвижных звеньев, имеем n=3.
3. Определяем класс и число кинематических пар:
Все пары вращательные 5 класса, следовательно
Р5=4 (0.1; 1,2; 2,3; 3,0)
4. Определяем степень подвижности механизма по формуле Чебышева
W=3n –2P5 = 3 ·3 –2 ·4=1, (1.7)
5. Строим структурную схему механизма (рисунок 1.6).
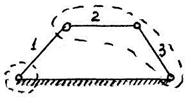
Рисунок 1.6 − Структурная схема рычажного механизма
6. Расчленяем механизм на структурные единицы и определяем их класс (рисунок 1.7).
Механизм 1-го класса Группа Ассура 2 класса, 2 порядка
Рисунок 1.7 − Структурные единицы
7. Определяем класс всего механизма в целом. Класс механизма определяется наивысшим классом группы Ассура. В данном случае в механизм входит группа Ассура 2 класса, следовательно, механизм в целом относится к механизму второго класса.
Пример № 2. Выполнить структурный анализ рычажного механизма, состоящего из пяти подвижных звеньев (рисунок 1.8).
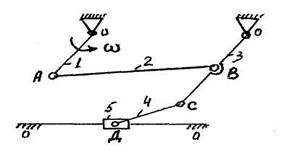
Рисунок 1.8 − Кинематическая схема пятизвенного механизма
Структурный анализ удобнее выполнять, используя вспомогательную таблицу, имеющую вид:
Таблица 1.2 −Кинематические пары, звенья и класс пар
| Кинемат. пары | 1V | V | V1 | V11 | |||
| №№ звеньев | 0,1 | 1,2 | 2,3 | 3,0 | 3,4 | 4,5 | 5,0 |
| Класс |
Из таблицы 1.2 следует, что: n=5, P5=7.
Тогда подвижность механизма будет равна:
W=3n - 2 P5 = 3 ·5 –2 ·7=1, (1.8)
Значит, механизм состоит из механизма первого класса и присоединенных к нему групп Ассура.
Строим структурную схему механизма и расчленяем на структурные единицы (рисунок 1.9).
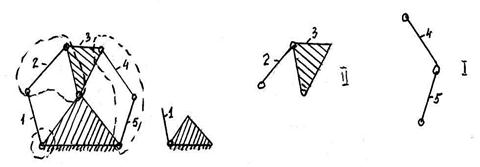
Структурная схема Механизм 1 класса Группы Ассура 2 класса
Рисунок 1.9 − Структурные единицы рычажного механизма
Выводы: Механизм состоит из механизма первого класса и двух групп Ассура второго класса 2-го порядка. Следовательно, в целом механизм относится к механизму второго класса.

