 2014-02-24
2014-02-24 1679
1679План
Лекция № 2 Кинематический анализ механизмов
Контрольные вопросы
1. Что называется механизмом?
2. Как классифицируются кинематические пары?
3. Какие кинематические пары относятся к низшим и к высшим?
4. Как определяется подвижность механизма, формула?
5. Что называется группой Ассура?
6. Как определяется класс гр. Ассура?
7. Цель и принцип построения заменяющего механизма.
8. Какова цель структурного анализа механизма, последовательность действия при анализе?
9. Как определяется класс всего механизма в целом?
1. Задачи кинематического анализа.
2. Определение перемещений (положений) звеньев и траекторий, описываемых точками звеньев.
3. Определение линейных скоростей отдельных точек звеньев и угловых скоростей звеньев.
4. Определение линейных ускорений отдельных точек звеньев и угловых ускорений звеньев.
1. Задачи кинематического анализа
Основной задачей кинематики механизмов является изучение движения звеньев механизмов вне зависимости от сил, действующих на эти звенья. Кинематический анализ состоит из решения трёх задач:
а) определение крайних (мертвых) положений звеньев механизма, пере-мещения звеньев и траекторий, описываемых точками звеньев;
б) определение скоростей отдельных точек звеньев и угловых скоростей звеньев;
в) определение ускорения отдельных точек звеньев и угловых ускорений звеньев.
Основным назначением механизма является выполнение необходимых движений, которые описываются посредством кинематических характеристик. К ним относятся траектории точек и звеньев, обобщаемые координаты, перемещения точек и звеньев, их скорости и ускорения. По этим характеристикам конструктор выбирает структурную схему механизма и определяет размеры его звеньев.
Звено, которому приписывается одна или несколько обобщенных координат, называют начальным звеном. При плоскопараллельном движении первое звено (начальное), вращающееся вокруг неподвижной оси, т. е. образующее со стойкой вращательную кинематическую пару, имеет одну степень свободы и его положение определяется одним параметром, например: угловой координатой, а звено, перемещающееся поступательно относительно стойки линейной координатой.
Для решения этой задачи должны быть заданы кинематическая схема и функция перемещения начального звена φ = φ(t) − для вращательной пары или S = S(t) – для поступательной.
Кинематическая схема строится в масштабе для ряда положений (8-12 и более) механизма, соответствующим равным углам поворота начального звена за 1 оборот. При этом можно использовать графический либо аналитический способы. После построения кинематической схемы механизма сначала выполняется структурный анализ с целью проверки его на работоспособность, а затем – кинематический анализ.
Рассмотрим графический способ определения положений точек звеньев и точек на примере кривошипно-ползунного механизма (рисунок 2.1) 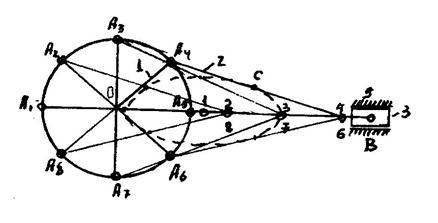
Рисунок 2.1 − Схема кривошипно-ползунного механизма
Порядок построения положений звеньев механизма можно принять следующим:
1. Наносим на чертеже неподвижные оси О и В, далее радиусом ОА проводим окружность, представляющую собой геометрическое место точек А.
2. Разбиваем окружность, на несколько равных частей (например, на 8 с точками А1…А8), для которых требуется определить положения всех звеньев механизма. Соединив последовательно начальное звено 1 в положениях А1…А8 с ползуном 3 посредством звена 2, вычерченного в масштабе, получим положение звеньев в точках 1….8.
3. По найденным положениям звеньев механизма можно построить траектории, описываемые отдельными точками звеньев (например, ползуна или точки С на звене 2), обведя последовательные положения точки, к примеру т. С плавной кривой.
Траектории точек, принадлежащих шатуну, носят названия шатунных кривых. Этими кривыми пользуются в технике для воспроизводства движения рабочих органов различных машин и механизмов.

