 2014-02-09
2014-02-09 2578
2578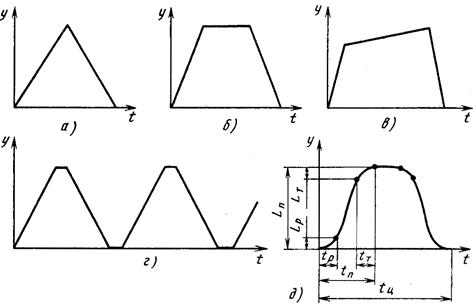
Рис. 9.1. – Примерные циклограммы двухпозиционных приводов: а) «прямой ход – обратный ход – остановка»; б) «прямой ход – выстой – обратный ход – остановка»; в) «быстрый подвод – рабочий ход – обратный ход – остановка»; г) периодическое возвратно-поступательное (поворотное) движение; д) «прямой ход – выстой – обратный ход – остановка» с выделенными зонами разгона и торможения; L п и t п – полный ход и время выходного звена; L р и t р – перемещение и время при разгоне; L т и t т –при торможении; t ц – полное время цикла
Большая группа объемных приводов различных машин и технологического оборудования имеет в процессе работы только два фиксированных положения (позиции). Такие приводы называют двухпозиционными. В качестве двигателей в них обычно используют наиболее простые по конструкции гидро- или пневмодвигатели возвратно-поступательного или возвратно-поворотного движения. Управление перемещением выходного звена привода из одной позиции в другую выполняется наиболее простым релейным способом посредством гидро- или пневмораспределителей.
Относительно простые циклы программного управления двухпозиционным приводом могут осуществляться введением в систему небольшого числа дополнительных гидроаппаратов. Управляющее воздействие может быть ручное, механическое, гидравлическое, электромагнитное или комбинированное.
Примеры простых циклов, автоматически отрабатываемых двухпозиционными приводами, показаны на рис. 9.1. Циклограммы изображены в координатах: t – время, у – перемещение выходного звена.
Для автоматического выполнения приведенных циклов необходимы гидро- или пневмоаппараты, выполняющие управление приводом по пути, нагрузке и времени.
9.1. Управление по пути
Управление по пути осуществляется обычно двухпозиционными трех- или четырехлинейными распределителями с механическим воздействием на них от кулачков или упоров, закрепленных на выходном звене привода или на исполнительном механизме машины.
Распределители размещают так, чтобы их входной элемент, например рычаг с роликом, взаимодействовал с кулачком в конечных положениях выходного звена. Возврат запорно-регулирующего элемента у этих распределителей обычно производится пружиной. Распределители с путевым механическим управлением выполняются малогабаритными. У путевых гидрораспределителей условный проход составляет 6, 8 и 10 мм, у пневмораспределителей – 2, 5 и 8 мм, поэтому в приводах со значительным расходом рабочей среды применяют вторую ступень управления – распределители с достаточным проходным сечением и двусторонним гидравлическим или пневматическим управлением.
Пример схемы исполнительной части гидропривода, автоматически отрабатывающего простой цикл «прямой ход – обратный ход – остановка», показан на рис. 9.2. Гидропривод включается кратковременным воздействием на двухпозиционный гидрораспределитель Р1 с ручным управлением и возвратной пружиной. При этом гидрораспределитель подает сигнал управления на распределитель Р2, переключая его в левое положение.
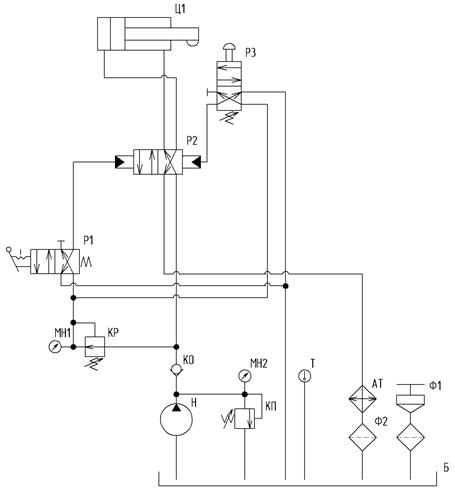
Рис. 9.2. – Схема гидропривода с путевым управлением по циклу «прямой ход – обратный ход – остановка»
Рабочая жидкость от насоса по напорному трубопроводу поступает в поршневую полость цилиндра Ц1, шток которого выдвигается до тех пор, пока кулачек, закрепленный на нем не нажмет на кулачек распределителя Р3. Через распределитель Р3 управляющий сигнал поступит на правый торец распределителя Р2, который переключится в правое положение, и жидкость будет поступать в штоковую полость цилиндра Ц1. При этом выходное звено цилиндра (шток) совершит обратный ход до остановки.
9.2. Управление по нагрузке
Путевое управление движением привода посредством кулачков и путевых распределителей не обеспечивает высокой точности остановки выходного звена в крайнем положении. Остановка с точностью до девяти долей миллиметра возможна с помощью «силового» упора в сочетании с управлением по нагрузке (рис. 9.3). Сущность управления по нагрузке состоит в том, что используется повышение давления рабочей среды при остановке выходного звена объемного двигателя Ц1 на неподвижном упоре.
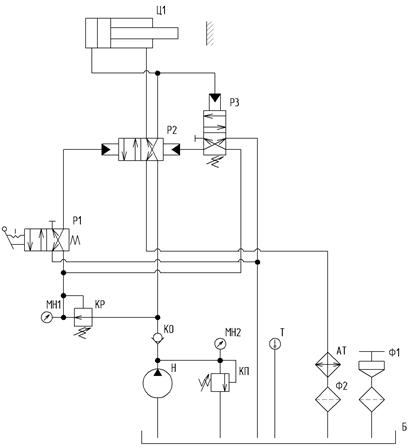
Рис. 9.3. – Схема гидропривода с управлением по нагрузке по циклу «прямой ход – обратный ход – остановка»
Давление повышается до значения, при котором срабатывает предохранительный клапан в насосной установке или до давления газов в аккумуляторе (на схеме не показан). Из-за увеличения давления выше рабочего срабатывает распределитель Р3,пружина которого настроена на максимальное давление рабочей среды.
В остальном принцип действия такого гидропривода такой же как и привода с путевым управлением.
9.3. Управление по времени
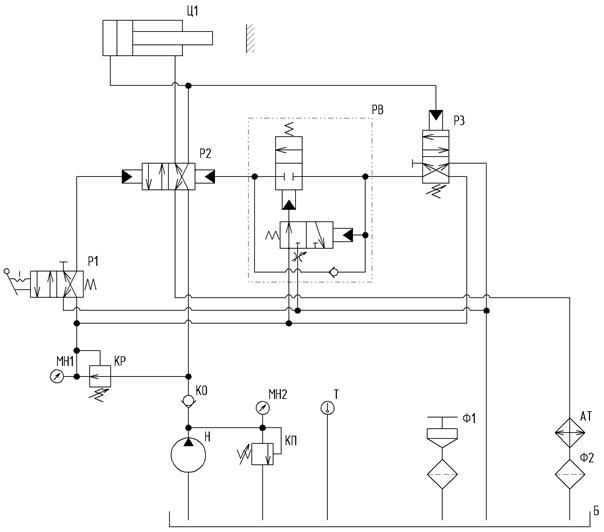
Рис. 9.4. – Схема гидропривода с автоматическим управлением по циклу «прямой ход – выдержка на упоре (под нагрузкой) – обратный ход – остановка»
Чтобы обеспечить определенную выдержку времени в зоне остановки выходного звена, привода на упоре, в схеме привода предусматривается клапан выдержки времени РВ (реле времени) (рис. 9.4). При этом распределитель Р2 второй ступени управления переключается не сразу после срабатывания распределителя Р3, а через определенное время, соответствующее настройке реле времени. Принцип действия клапана реле времени состоит в замедленном благодаря регулируемому дросселю заполнении рабочей средой внутренней управляющей камеры. Обратный клапан в реле обеспечивает свободное обратное течение жидкости в управляющей гидролинии.

