 2014-02-09
2014-02-09 2912
2912Доплеровские РВ имеют датчики сигнала, использующие эффект Доплера. Характерный особенностью этих взрывателей! является то, что их передатчик работает в режиме непрерывного излучения радиоволн с постоянной амплитудой и частотой. Принцип действия доплеровского РВ гетеродинного типа сводится к следующему (рисунок 14.32). Генератор высокой частоты (ГВЧ) взрывателя через передающую антенну  излучает в пространство высокочастотные колебания, являющиеся зондирующим сигналом. Часть этого сигнала поступает на смеситель. Зондирующие сигналы рассеиваются в пространстве и, достигнув цели, отражаются от нес и, пройдя обратный путь, принимаются антенной
излучает в пространство высокочастотные колебания, являющиеся зондирующим сигналом. Часть этого сигнала поступает на смеситель. Зондирующие сигналы рассеиваются в пространстве и, достигнув цели, отражаются от нес и, пройдя обратный путь, принимаются антенной  и в виде сигнала
и в виде сигнала  . который также поступает на смеситель. Сигналы ГВЧ представляют собой гармонические колебания, поэтому можно записать
. который также поступает на смеситель. Сигналы ГВЧ представляют собой гармонические колебания, поэтому можно записать
 (14.25)
(14.25)
где  - амплитуда сигнала;-
- амплитуда сигнала;-
 - круговая частота сигнала;
- круговая частота сигнала;
 - время.
- время.
 |
Рисунок 14.32. Блок-схема доплеровского РВ гетеродинного типа
Принятый отраженный от цели сигнал будет отличаться амплитудой  и фазой, которая по отношению к фазе сигнала
и фазой, которая по отношению к фазе сигнала  ГВЧ, соответствующей данному моменту времени , будет запаздывать на время, за которое радиоволны пробегают путь до цели и обратно. Следовательно, сигнал по аналогии с (10.6) будет описываться выражением
ГВЧ, соответствующей данному моменту времени , будет запаздывать на время, за которое радиоволны пробегают путь до цели и обратно. Следовательно, сигнал по аналогии с (10.6) будет описываться выражением
 , (14.26)
, (14.26)
где  (14.27)
(14.27)
 - расстояние до цели;
- расстояние до цели;  - скорость распространения радиоволн.
- скорость распространения радиоволн.
Так как круговая частота сигнала равна производной по времени от его фазы, то с учетом (14.27) будем иметь
 (14.28)
(14.28)
где  - скорость относительного движения цели и РВ.
- скорость относительного движения цели и РВ.
Выражение (14.28) показывает, что частота  отраженного сигнала отличается от частоты , излучаемого на величину
отраженного сигнала отличается от частоты , излучаемого на величину
 (14.29)
(14.29)
называемую частотой Доплера.
Любая частота, в том числе и  , является величиной сугубо положительной, на что и указывает модуль производной в выражении (14.29). Если
, является величиной сугубо положительной, на что и указывает модуль производной в выражении (14.29). Если  , то есть РВ и цель сближаются, при этом
, то есть РВ и цель сближаются, при этом  . Наоборот, при удалении РВ от цели
. Наоборот, при удалении РВ от цели  и
и  . При частота сигнала
. При частота сигнала  .. Это означает, что взрыватель доплеровского типа, реагирующий на частоту, не формирует сигнал, если он движется на неизменном расстоянии от цели. Если же это расстояние сначала уменьшается, а затем после достижения минимального значения начнет возрастать, то равенство нулю производной этого расстояния будет достигаться лишь в одной точке, то есть в момент минимального промаха. В соответствии с (10.10) в этот же момент времени п . Однако это не будет означать пропадания сигнала, а лишь то, что он скачком изменил свою фазу. Таким образом, если в датчиках сигнала доплеровских взрывателей устанавливать фазовые детекторы, они могут реагировать на момент пролета ракетой минимального расстояния от цели. У обычных же взрывателей доплеровского типа в блоке обработки сигнала выделяется сигнал частоты Доплера
.. Это означает, что взрыватель доплеровского типа, реагирующий на частоту, не формирует сигнал, если он движется на неизменном расстоянии от цели. Если же это расстояние сначала уменьшается, а затем после достижения минимального значения начнет возрастать, то равенство нулю производной этого расстояния будет достигаться лишь в одной точке, то есть в момент минимального промаха. В соответствии с (10.10) в этот же момент времени п . Однако это не будет означать пропадания сигнала, а лишь то, что он скачком изменил свою фазу. Таким образом, если в датчиках сигнала доплеровских взрывателей устанавливать фазовые детекторы, они могут реагировать на момент пролета ракетой минимального расстояния от цели. У обычных же взрывателей доплеровского типа в блоке обработки сигнала выделяется сигнал частоты Доплера  которая связана с круговой частотой известным соотношением
которая связана с круговой частотой известным соотношением  . Аналогичным образом можно записать и частоту излучаемого сигнала
. Аналогичным образом можно записать и частоту излучаемого сигнала
Учитывая также, что период излучаемых колебаний  связан с его частотой
связан с его частотой  обратной зависимостью
обратной зависимостью  и что при этом величина
и что при этом величина  представляет собой длину волны
представляет собой длину волны  излучаемого сигнала., вместо 14.29) можно получить следующую формулу для определения частоты доплеровского сигнала:
излучаемого сигнала., вместо 14.29) можно получить следующую формулу для определения частоты доплеровского сигнала:
 (14.30)
(14.30)
Из анализа выражения (10.11) следует, что при =1м (что соответствует частоте ГВЧ  ) и
) и 
 . Следовательно, для реальных условий сближения ракеты с целью частота Доплера является более низкой частотой, чем частота сигнала, излучаемого передатчиком.
. Следовательно, для реальных условий сближения ракеты с целью частота Доплера является более низкой частотой, чем частота сигнала, излучаемого передатчиком.
Рассмотрим более подробно процесс формирования рабочего сигнала, его обработку и использование при формировании команды. В смесителе происходит сложение сигналов  и , поэтому результирующий сигнал в соответствии с (14.25) и (14.26) будет изменяться по закону
и , поэтому результирующий сигнал в соответствии с (14.25) и (14.26) будет изменяться по закону
 . (14.31)
. (14.31)
Раскрывая косинус разности двух углов, вводя промежуточные обозначения
 ;
;  ;
;
 ;
;  (14.32)
(14.32)
и выполняя преобразования, вместо выражения (14.31) будем иметь
 , (14.33)
, (14.33)
где  .
.
Имея в виду, что параметр  , сомножитель, содержащий этот параметр, можно разложить в ряд Маклорена и сохранить в нем первые два члена. В результате этого из (14.33) получим
, сомножитель, содержащий этот параметр, можно разложить в ряд Маклорена и сохранить в нем первые два члена. В результате этого из (14.33) получим
 . (14.34)
. (14.34)
Это выражение показывает, что на выходе смесителя результирующий сигнал представляет собой высокочастотное колебание, изменяющееся с такой же частотой ,. как и излучаемый сигнал , но отстающий or него по фазе., на. угол  . Амплитуда этого сигнала модулируется гармонической функцией
. Амплитуда этого сигнала модулируется гармонической функцией  , меняющейся с частотой Доплера
, меняющейся с частотой Доплера  .
.
На выходе амплитудного детектора будет получен рабочий сигнал  , изменяющийся но закону
, изменяющийся но закону
 (14.35)
(14.35)
где  - амплитуда рабочего сигнала.
- амплитуда рабочего сигнала.
Из сравнения выражений (14.34) и (14.35) следует, что амплитуда рабочего сигнала может быть записана в виде
 (14.36)
(14.36)
где  - постоянный коэффициент, зависящий от параметров смесителя и детектора.
- постоянный коэффициент, зависящий от параметров смесителя и детектора.
Характер изменения сигналов на выходе смесителя и детектора приведен на рисунке 14.33. Следует подчеркнуть, что рабочий сигнал доплеровского РВ содержит информацию о дальности до цели и о скорости сближения с ней.
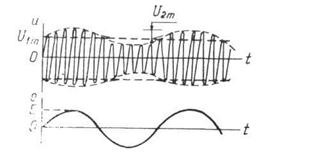
Рисунок 14.33 Сигналы на выходе смесителя  и детектора доплеровского РВ
и детектора доплеровского РВ
От дальности до цели зависит амплитуда отраженного сигнала . а в соответствии с (14.36) и амплитуда рабочего сигнала. Это обстоятельство позволяет осуществлять настройку, например, бомбовых РВ на заданную высоту срабатывания  (рисунок 14.34).
(рисунок 14.34).
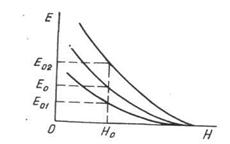 |
Рисунок 14.34 Определение высоты срабатывания бомбового РВ
По мере приближения взрывателя к поверхности земли амплитуда его рабочего сигнала будет возрастать и при достижении некоторого порогового значения  высоте во взрывателе сформируется команда на подрыв боевой части. Если вследствие изменения отражающих свойств земли амплитуда рабочего сигнала с уменьшением высоты будет расти быстрее или медленнее, то можно, изменяя величину порогового напряжения до величин
высоте во взрывателе сформируется команда на подрыв боевой части. Если вследствие изменения отражающих свойств земли амплитуда рабочего сигнала с уменьшением высоты будет расти быстрее или медленнее, то можно, изменяя величину порогового напряжения до величин  или
или  , добиться срабатывания взрывателя на одной и той же высоте ..
, добиться срабатывания взрывателя на одной и той же высоте ..
От скорости сближения РВ с целью зависит частота рабочего сигнала . В таком случае блок формирования команды может управляться от инерционных цепочек (рисунок 14.32).
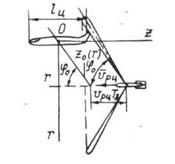 |
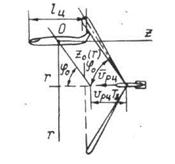
Рисунок 14.35. Поверхности реагирования и срабатывания РВ
Рабочий сигнал после усиления и ограничения по амплитуде поступает на  цепочку, на выходе которой формируется напряжение, пропорциональное количеству положительных полуволн сигнала частоты Доплера. Настройка блока формирования команды осуществляется таким образом, чтобы он срабатывал в момент прихода
цепочку, на выходе которой формируется напряжение, пропорциональное количеству положительных полуволн сигнала частоты Доплера. Настройка блока формирования команды осуществляется таким образом, чтобы он срабатывал в момент прихода  ой полуволны (
ой полуволны ( =2, 3, 4,...), частоты рабочего сигнала. Таким образом инерционная цепочка с блоком формирования команды собирается по схеме счетчика импульсов.
=2, 3, 4,...), частоты рабочего сигнала. Таким образом инерционная цепочка с блоком формирования команды собирается по схеме счетчика импульсов.
Отрезок времени  от момента появления доплеровского сигнала до момента срабатывания блока формирования команды определяет инерционность взрывателя. Поэтому для сигнала с известным периодом колебаний будем иметь
от момента появления доплеровского сигнала до момента срабатывания блока формирования команды определяет инерционность взрывателя. Поэтому для сигнала с известным периодом колебаний будем иметь
 (14.37)
(14.37)
Первый сигнал формируется в момент «касания» цели внутренней поверхности диаграммы направленности приемной антенны, имеющей, как правило, воронкообразную форму (рисунок 14.35). Такая форма диаграммы направленности обеспечивает круговой обзор пространства вокруг ракеты. Из рисунка 14.35 следует, что
 , (14.38)
, (14.38)
где  - модуль вектора относительной.скорости ракеты и цели;
- модуль вектора относительной.скорости ракеты и цели;
 - угол, который составляет с продольной осью ракеты главный максимум диаграммы направленности приемной антенны.
- угол, который составляет с продольной осью ракеты главный максимум диаграммы направленности приемной антенны.
Имея в виду, что  , используя выражения (10.11) и (10.19), вместо (10.18) запишем
, используя выражения (10.11) и (10.19), вместо (10.18) запишем
 , (14.39)
, (14.39)
Видно, что при прочих равных условиях инерционность взрывателя будет зависеть от относительной скорости ..
Кроме инерционности взрывателя момент времени его срабатывания  , отсчитываемый от появления первого импульса частоты Доплера, будет зависеть также от времени
, отсчитываемый от появления первого импульса частоты Доплера, будет зависеть также от времени  t формируемого блоком задержки. Учитывая, что
t формируемого блоком задержки. Учитывая, что  выражение (10.20), будем иметь
выражение (10.20), будем иметь
 . (14.40)
. (14.40)
Это выражение показывает, что с точки зрения формирования требуемого времени задержки доплеровские РВ являются самонастраивающимися. В самом деле, время задержки , при скорости определяет смещение поверхности срабатывания взрывателя относительно поверхности реагирования.








