 2014-02-12
2014-02-12 2468
2468Идеальный операционный усилитель (ОУ) представляет собой активный элемент с двумя входами (неинвертирующий и инвертирующий) и одним выходом, имеющий бесконечно большое усиление, бесконечно большое входное и бесконечно малое выходное сопротивления (рисунок 5.19).
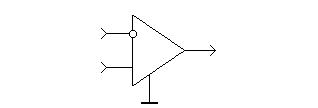
Рисунок 5.19 – Операционный усилитель
Модель идеального операционного усилителя может быть построена на основе источника напряжения, управляемого напряжением (рисунок 5.20).
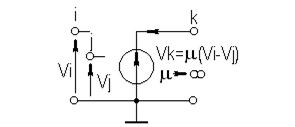
Рисунок 5.20 – Модель идеального ОУ
Неидеальный ОУ отличается от идеального усилителя многими аспектами. Точную модель операционного усилителя можно получить заменой содержащихся в нем транзисторов и диодов их схемными моделями. Однако, учитывая сложность подобных моделей, обычно используют так называемые макромодели. С помощью макромоделей можно отобразить конечные значения входных и выходного сопротивлений, конечность коэффициента передачи и их частотную зависимость. В случае нелинейной макромодели можно также отобразить режим ограничения выходного напряжения и конечное значение скорости изменения выходного напряжения.
Ограничение выходного напряжения  ê может имитироваться в модели использованием нелинейного сопротивления с характеристикой, рисунке 5.21.
ê может имитироваться в модели использованием нелинейного сопротивления с характеристикой, рисунке 5.21.
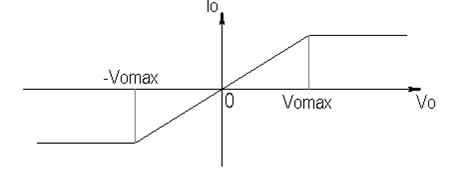
Рисунок 5.21 – Характеристика нелинейного сопротивления
Для имитации конечной скорости нарастания следует воспользоваться нелинейным блоком (рисунок 5.22), где нелинейный управляемый напряжением источник тока характеризуется кривой насыщения (рисунок 5.23).
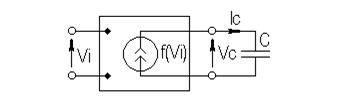
Рисунок 5.22 – Нелинейный блок имитации конечной скорости
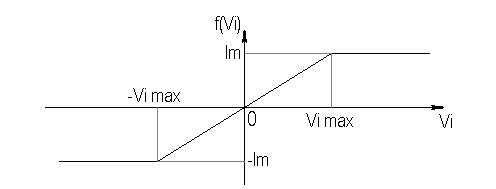
Рисунок 5.23 – Характеристика ограничения нелинейного блока
Скорость нарастания выходного напряжения будет определяться выходной емкостью  . Так как выходной ток управляемого источника не может быть больше
. Так как выходной ток управляемого источника не может быть больше  , то можно записать
, то можно записать
 . (5.64)
. (5.64)
На рисунке 5.24 показаны типовые амплитудно- и фазочастотные зависимости (диаграммы Боде) коэффициента передачи ОУ.
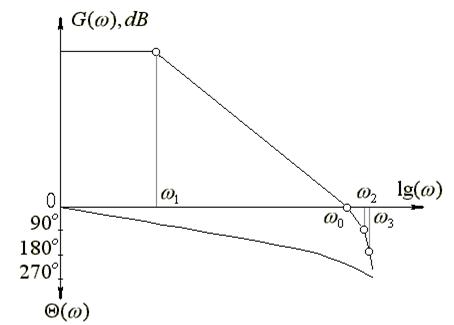
Рисунок 5.24 – Диаграмма Боде операционного усилителя
Первая угловая частота  называется доминантно-полюсной частотой; частота
называется доминантно-полюсной частотой; частота  , при которой кривая
, при которой кривая  пересекает ось абсцисс, называется частотой единичного усиления.
пересекает ось абсцисс, называется частотой единичного усиления.
Используя предшествующие рассуждения, получаем возможную макромодель ОУ (рис. 5.25).
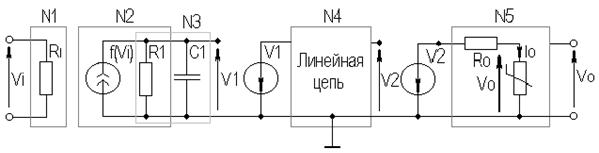
Рисунок 5.25 – Макромодель операционного усилителя
Модель состоит из пяти ступеней-каскадов: входной –  ; ступени ограничения скорости изменения (выходного напряжения) и коэффициента передачи
; ступени ограничения скорости изменения (выходного напряжения) и коэффициента передачи  ; ступени доминантного полюса
; ступени доминантного полюса  ; ступени единичного усиления высшей полюсной частоты
; ступени единичного усиления высшей полюсной частоты  ; выходной ступени ограничения выходного напряжения
; выходной ступени ограничения выходного напряжения  .
.
Входная ступень с помощью  моделирует входное сопротивление в дифференциальном режиме. Вторая ступень содержит нелинейный управляемый напряжением источник тока, нагруженный на емкость
моделирует входное сопротивление в дифференциальном режиме. Вторая ступень содержит нелинейный управляемый напряжением источник тока, нагруженный на емкость  . При выборе большого сопротивления соединение из
. При выборе большого сопротивления соединение из  моделирует скорость изменения выходного напряжения в соответствии с (5.64) путем выбора
моделирует скорость изменения выходного напряжения в соответствии с (5.64) путем выбора  и . Третья ступень - цепь
и . Третья ступень - цепь  моделирует доминантный полюс
моделирует доминантный полюс
 (5.65)
(5.65)
в соответствии с диаграммой Боде (рисунок 5.25), предполагающей, что коэффициент передачи спадает обычно со скоростью 6 dB на октаву (20 dB на декаду). Емкость в этой модели входит одновременно в ступени  и , поэтому цепь
и , поэтому цепь  выбирается как из условия нешунтирования нелинейного источника, так и доминантной частоты. Если частота доминантного усиления не указана в паспортных данных, то она может быть приближенно оценена из следующего соотношения:
выбирается как из условия нешунтирования нелинейного источника, так и доминантной частоты. Если частота доминантного усиления не указана в паспортных данных, то она может быть приближенно оценена из следующего соотношения:
 , (5.66)
, (5.66)
где  - статический коэффициент передачи. Вывод соотношения (5.66) основан на том факте, что на частотах, соизмеримых с
- статический коэффициент передачи. Вывод соотношения (5.66) основан на том факте, что на частотах, соизмеримых с  , большая часть тока нелинейного источника замыкается через и можно записать
, большая часть тока нелинейного источника замыкается через и можно записать
 , (5.67)
, (5.67)
где  - крутизна нелинейного источника. Откуда для частоты единичного усиления можно записать
- крутизна нелинейного источника. Откуда для частоты единичного усиления можно записать
 . (5.68)
. (5.68)
Если при этом сделать замену
 , (5.69)
, (5.69)
то с учетом (5.65) получаем соотношение (5.66).
Четвертая ступень является в общем случае линейным четырехполюсником, имитирующим точки перегиба АЧХ и ФЧХ (диаграмма Боде), на высших полюсных частотах. Для этой цели можно предложить большое количество RC-схем с уточнением их параметров известными методами аппроксимации и оптимизации. Обычно операционные усилители реализуют с минимально-фазовой передаточной функцией. Тогда в соответствии с интегральным соотношением Гильберта с помощью  достаточно имитировать АЧХ либо ФЧХ, так как между ними существует в этом случае связь.
достаточно имитировать АЧХ либо ФЧХ, так как между ними существует в этом случае связь.
Пятая ступень состоит из линейного и нелинейного сопротивлений, причем  выбирается равным выходному сопротивлению операционного усилителя. Нелинейное сопротивление с характеристикой
выбирается равным выходному сопротивлению операционного усилителя. Нелинейное сопротивление с характеристикой  (рисунок 5.21) выбирается так, чтобы точка перегиба напряжения, определяющая пиковое выходное напряжение операционного усилителя
(рисунок 5.21) выбирается так, чтобы точка перегиба напряжения, определяющая пиковое выходное напряжение операционного усилителя  , соответствовала паспортным данным. Заметим, что нелинейное сопротивление ведет себя как разомкнутая цепь для всех выходных напряжении . Следовательно, данная ступень используется для имитации как выходного сопротивления, так и ограничения выходного напряжения.
, соответствовала паспортным данным. Заметим, что нелинейное сопротивление ведет себя как разомкнутая цепь для всех выходных напряжении . Следовательно, данная ступень используется для имитации как выходного сопротивления, так и ограничения выходного напряжения.
В результате все параметры модели операционного усилителя могут быть определены из паспортных данных либо измерены экспериментально.
В случае линейной модели достаточно лишь имитировать входное и выходное сопротивления, коэффициент передачи и несколько ближайших полюсов. Причем вместо источника напряжения, управляемого напряжением, часто используют источник тока, управляемого напряжением с крутизной
 , (5.74)
, (5.74)
где  - выходное сопротивление ступени.
- выходное сопротивление ступени.
Один из вариантов линейной модели с имитацией первых двух полюсов приведен на рис. 5.26.
|
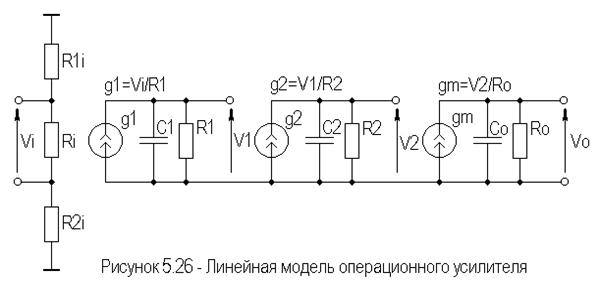
В этой модели входная цепь имитирует входное сопротивление дифференциального операционного усилителя. Первые две ступени с единичным коэффициентом передачи имитируют две ближайшие полюсные частоты

Третья ступень имитирует коэффициент передачи операционного усилителя  и выходной импеданс операционного усилителя параллельным соединением
и выходной импеданс операционного усилителя параллельным соединением  .
.








