 2014-02-12
2014-02-12 6353
6353Под законом регулирования понимают зависимость регулирующего воздействия на объект y (входная величина объекта) от отклонения  (входная величина регулятора) регулируемой величины
(входная величина регулятора) регулируемой величины  от заданного значения
от заданного значения  .
.
Требуемое качество регулирования в процессе эксплуатации АСР, кроме безусловного требования устойчивости, определяется следующими критериями: минимальное время регулирования, отсутствие перерегулирования, минимальная интегральная квадратичная ошибка и др.
Выбор того или иного критерия оптимальности определяется технологическими требованиями к системе регулирования и является одной из первых задач по выбору типового регулятора.
С экономической и в ряде случаев с технологической точки зрения наиболее целесообразно применять в качестве критерия оптимальности минимальную интегральную квадратичную оценку, так как реализация такого критерия почти всегда приводит к минимальным потерям при регулировании и к минимальным динамическим ошибкам.
Наибольшим запасом по устойчивости обладают системы, настроенные по критерию минимизации времени регулирования или без перерегулирования.
При 200/0-ном перерегулировании обеспечивается малое время переходного процесса и первого полупериода.
Когда требуется исключить влияние регулирующего воздействия данной системы на другие величины сложного объекта, целесообразно, чтобы переходный процесс имел апериодический характер.
Таким образом, при выборе типа регулятора предполагают, что в системе должен существовать определённый переходный процесс (см. рис.2):
1) апериодический без перерегулирования,
2) с 200/0- ным перерегулированием,
3) с минимальной интегральной квадратичной оценкой.
рис.2. Типовые переходные процессы:
а- апериодический процесс; б - 20%-ное перерегулирование; в - процесс с min ;
;
Для выбора закона регулирования и расчёта настроек регулятора необходимо знать:
1. Параметры объекта регулирования  ,
,  ,
,  .
.
2. Максимально возможное возмущение в системе со стороны регулирующего органа yв, выраженное в процентах хода регулирующего органа.
3. Допустимые показатели качества переходного процесса:
 — допустимое время регулирования,
— допустимое время регулирования,
 — допустимая статистическая ошибка,
— допустимая статистическая ошибка,
 — допустимое динамическое отклонение.
— допустимое динамическое отклонение.
Основные области применения линейных регуляторов характеризуется следующим образом:
· И-регулятор применяют со статическими и астатическими объектами при медленных изменениях возмущений и с малым временем запаздывания  < 0,1;
< 0,1;
· П-регулятор применяют со статическими и астатическими объектами при любой инерционности и времени запаздывания, определяемым соотношением: < 0,3;
· ПИ-регулятор применяется при любой инерционности объекта и времени запаздывания, определяемым условием:  .
.
После этапа определения типа переходного процесса выбирают или задают показатели качества переходного процесса: ; ; .
Затем рассчитывают динамический коэффициент регулирования:
Rд=/(yв).
По номограммам (рис.3.) определяют точку с координатами и Rд, соответствующую исходным и расчётным данным. Все кривые, лежащие ниже этой точки, соответствуют законам регулирования удовлетворяющим заданным требованиям для статистических объектов.
рис.3. Графики для выбора закона регулирования при статических объектах:
а - апериодический процесс; б - 20%-ное перерегулирование; в - процесс с min;
1- И-регулятор; 2 - П-регулятор; 3 - ПИ-регулятор; 4 - ПИД-регулятор.
Следующим этапом выбора регулятора является проверка времени регулирования, которое определяют по номограммам (рис.4.), позволяющим находить относительное время регулирования 
 /для различных законов регулирования на статических объектах.
/для различных законов регулирования на статических объектах.
Время регулирования должно удовлетворять условию: <, где =
В противном случае необходимо рассмотреть возможность использования другого закона регулирования или другого типа переходного процесса.
Если был выбран П-закон регулирования, то необходимо проверить статистическую ошибку по соответствующей номограмме (рис.5.).
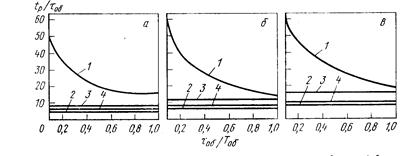 | |
| рис.4. Относительное время регулирования на статических объектах: а – апериодический процесс; б - 20%-ное перерегулирование;в – процесс с min; 1- И-регулятор; 2 - П-регулятор; 3 - ПИ-регулятор; 4 - ПИД-регулятор. | |
 | |
| рис.5 Относительная статистическая ошибка П-регулятора на статическихобъектах для типовых процессов: 1 – апериодического процесса; 2 - с 20%-ным перерегулированием; 3 - с min; |
Относительная статистическая ошибка  не должна превышать допустимое значение
не должна превышать допустимое значение  :<.
:<.
Иначе необходимо рассмотреть ПИ-, ПИД- законы регулирования, обеспечивающие регулирование без статистической ошибки (астатическое регулирование).
После выбора закона регулирования определяют параметры настройки регулятора

