 2015-01-22
2015-01-22 920
920До настоящего момента времени мы рассматривали надежность относительно простых систем, которые могли находиться в одном из двух состояний: работоспособном и неработоспособном.
Однако появление отказов отдельных элементов в более сложных системах могут привести не к полному выходу системы из строя, а лишь к некоторому ухудшению качества функционирования и снижению эффективности системы в целом (отказ одной или нескольких ЭВМ в классе ПЭВМ; отказ одного или нескольких двигателей в самолете и т.п.).
Для оценки качества функционирования таких систем необходимо ввести количественный показатель эффективности функционирования, учитывающий влияние таких частичных отказов.
Оценку эффективности функционирования можно проводить для двух типов систем:
1. Системы длительного действия;
2. Системы кратковременного действия.
Система длительного действия выполняет некоторую задачу в течение интервала Δt, начиная с некоторого момента t.
Если вероятность изменения состояния системы на заданном интервале Δt близка к единице, то такую систему рассматривают как сложную систему длительного действия (рис.42,а).
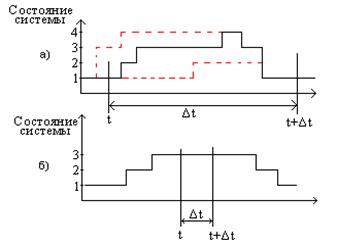
Рис.42. Изменение состояния:
а – системы длительного действия;
б – системы кратковременного действия.
Очевидно, что эффективность функционирования такой системы в течение времени t, t+Δt зависит от конкретных реализаций процесса изменения состояния системы на заданном интервале Δt (на рис.42,а возможные реализации показаны пунктирными линиями).
Система кратковременного действия выполняет задачи, продолжительность решения которых Δt такова, что за это время система наверняка останется в одном и том же состоянии (рис.42,б).
Рассмотрим пример системы, которая состоит из двух каналов связи.
Проанализируем эту систему как систему кратковременного действия.
В момент времени t (Δtà0) система может находиться в одном из четырех состояний (рис.43):
Н0 – оба канала работоспособны;
Н1 – отказал первый канал;
Н2 – отказал второй канал;
Н12 – отказали оба канала.
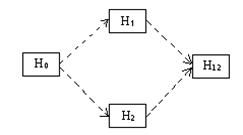
Рис.43. Состояния системы кратковременного действия.
Наибольшая эффективность функционирования системы будет, если работоспособны оба канала (Н0). Выходной эффект отсутствует при двух отказавших каналах (Н12).
Если рассматривать эту систему как систему длительного действия, то за интервал времени от t до t+Δt она может перейти из состояния Н0 либо в состояние Н1 (рис.44,а) или в состояние Н2 (рис.44,б) в случайный момент времени  .
.
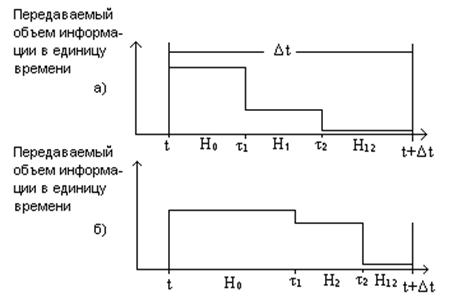
Рис.44. Переход системы в новое состояние в случайный момент времени:
а – для перехода из состояния Н0 в состояние Н1;
б – для перехода из состояния Н0 в состояние Н1.
Затем в случайный момент времени 
 система может перейти в состояние Н12 (Рис. 44,а). На Рис.44,б показан другой вариант изменения состояний системы.
система может перейти в состояние Н12 (Рис. 44,а). На Рис.44,б показан другой вариант изменения состояний системы.
Таким образом, передаваемый объем информации в единицу времени зависит от состояния системы, а эффективность системы на интервале от t до t+Δt определяется начальным состоянием и порядком смены состояний системы.








