 2015-01-30
2015-01-30 10434
10434Определение: числом степеней свободы механизма называется число независимых между собой параметров, однозначно определяющих положение всех звеньев относительно стойки. Эти независимые параметры называются обобщенными координатами механизма. Так как свободное тело в пространстве имеет “6” степеней свободы, то, будучи свободными, “n” подвижных звеньев механизма имели бы “6n” степеней свободы. Так как каждая пара “i-й” подвижности накладывает на относительное движение “6-i” связей, то общее число таких связей равно сумме: 
pi - число “i-й” подвижности.
Число степеней свободы пространственного механизма:

Для плоских механизмов:
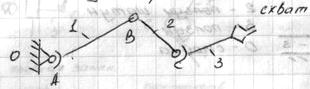
Пример 1(плоский кривошипно–ползунный механизм).
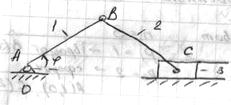 Число подвижных звеньев: n=3.
Число подвижных звеньев: n=3.
Число низших КП: pH = 4.
 - вращательные.
- вращательные.
 - поступательные.
- поступательные.

За обобщенную координату можно принять  .
.
Начальное звено – это звено, которому приписывается обобщенная координата.
Пример 2 (пространственный механизм)
 Число подвижных звеньев: n=3.
Число подвижных звеньев: n=3.
Число низших КП: p1 = 1.
[A(1,0)].
Число высших КП: p2 = 3.

Начальное звено – стойка “1”.
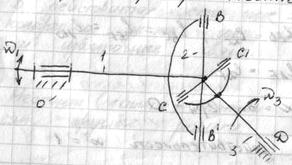
Пример 3 (пространственный механизм манипулятора).
 Число подвижных звеньев: n=3.
Число подвижных звеньев: n=3.
p1 = 1. - [B(1,2)].
p3 = 2. – [ A(1,0),C(2,3) ].

Нужно задать три угла поворота А и С
и один угол поворота В.
Пассивные связи и местные (лишние) степени свободы.
В некоторых механизмах имеются пассивные (избыточные) связи, которые дублируют ограничения, наложенные другими связями. В результате расчетное значение “W” получается меньше фактического.








