 2015-01-30
2015-01-30 1621
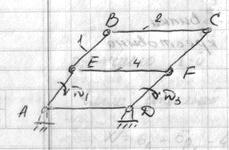
1621Пример 1(механизм двойного шарнирного параллелограмма).
 ;
; 

В действительности W = 1. Пассивную связь
вносит звено “4”, так как и без него звено “3” будет
вращаться со скоростью, равной ω0. Если условно
удалить звено “4”, то получим:
 . Однако звено “4” позволяет устранить неопределенность в движении, когда все звенья выстраиваются в одну линию.
. Однако звено “4” позволяет устранить неопределенность в движении, когда все звенья выстраиваются в одну линию.
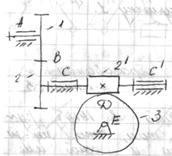 Пример 2 (комбинированный зубчатый механизм)
Пример 2 (комбинированный зубчатый механизм)
Число подвижных звеньев: n=3.
Число низших КП: p1 = 1.
[ A(1,0),CC’(2,0),E(3,0) ].
Число высших КП: p2 = 3.
[ B(1,2), D(2’,3) ].

Местные (лишние) степени свободы обычно вносят в круглые ролики.
 Пример 3 (кулачковый механизм)
Пример 3 (кулачковый механизм)
Число подвижных звеньев: n=3.
Число низших КП: p1 = 3.
[ A(1,0),C(2,3),В(3,0) ].
Число высших КП: p2 = 1.
[ B(1,2) ].

Вращение круглого ролика “2” представляет собой местную степень свободы. Она не влияет на движение выходного звена “3”, поэтому достаточно задать движение кулачку “1”.








