 2015-01-13
2015-01-13 1420
1420Глава 9
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ РАДИОСИСТЕМ
ВВЕДЕНИЕ В МОДЕЛИРОВАНИЕ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
В соответствии с определением (см. гл. 4) система представляет собой совокупность находящихся в определенной взаимосвязи компонентов, которые принадлежат части реального мира, являющейся объектом исследования. Это определение отражает две содержательные стороны понятия системы — наличие множества компонентов и определенных взаимосвязей между ними, за счет которых система имеет новые свойства, которых может и не быть у входящих в нее компонентов.
Свойства системы в равной степени определяются как характеристиками составляющих ее компонентов, так и характеристиками взаимосвязей между ними.
Можно показать [11], что с увеличением числа компонентов системы количество всевозможных парных связей между ними растет асимптотически как квадрат их числа. Таким образом, даже если влияние на работу системы каждой взаимосвязи будет невелико по сравнению с влиянием компонентов, количественное преобладание связей приведет к существенному, а зачастую и преобладающему их влиянию на функционирование системы. Отсюда следует, что систему нельзя рассматривать, а значит и моделировать, диакоптически, т.е. по отдельным образующим ее компонентам, так как при этом могут потеряться существенные свойства системы, определяемые ее взаимосвязями. Это обстоятельство является одним из отличительных свойств системных моделей и объясняет трудности, возникающие при моделировании больших систем по сравнению с моделированием отдельных компонентов.
Для формального описания факта наличия у системы как единого целого новых свойств, отсутствующих у составляющих компонентов, обычно используется определитель ковариационной матрицы R параметров компонентов системы или 


 сигналов на их выходах. Величина определителя det R зависит от количества элементов в матрице R и от значений
сигналов на их выходах. Величина определителя det R зависит от количества элементов в матрице R и от значений  коэффициентов ковариации между выходными параметрами компонентов системы. Чтобы проиллюстрировать вышесказанное, рассмотрим удобный для вычислений случай равенства всех коэффициентов ковариации, образующих ковариационную матрицу R. Значения определителя det R в зависимости от числа компонентов системы п и величин приведены в табл. 9.1.
коэффициентов ковариации между выходными параметрами компонентов системы. Чтобы проиллюстрировать вышесказанное, рассмотрим удобный для вычислений случай равенства всех коэффициентов ковариации, образующих ковариационную матрицу R. Значения определителя det R в зависимости от числа компонентов системы п и величин приведены в табл. 9.1.
Т а б л иц а 9.1
| п | detR | |||
| | ||||
| 0.1 | 0.5 | |||
| 1.00 | 0.99 | 0.75 | ||
| 1.00 | 0.80 | 0.30 | ||
| 1.00 | 0.63 | 0.036 | ||
| 1.00 | 0.50 | 0.004 |
Как видно из табл. 9.1, по мере увеличения взаимной ковариации между выходными сигналами компонентов, составляющих систему, величина определителя ковариационной матрицы det R уменьшается от единицы (отсутствие связей между компонентами  ) до нуля в случае максимально возможной связи компонентов
) до нуля в случае максимально возможной связи компонентов  . Из таблицы также видно, что det R убывает и по мере увеличения числа компонентов в системе, даже при сравнительно слабых связях между ними. В первом случае систему часто называют сложной, во второй — большой. Совокупность компонентов будет проявлять себя как система при условии det R << 1, и в этом случае ее нельзя рассматривать диакоптически независимо от того, чем обеспечивается малая величина определителя det R — большим числом компонентов или сильными связями между ними.
. Из таблицы также видно, что det R убывает и по мере увеличения числа компонентов в системе, даже при сравнительно слабых связях между ними. В первом случае систему часто называют сложной, во второй — большой. Совокупность компонентов будет проявлять себя как система при условии det R << 1, и в этом случае ее нельзя рассматривать диакоптически независимо от того, чем обеспечивается малая величина определителя det R — большим числом компонентов или сильными связями между ними.
Кроме большой размерности и сложности отметим еще ряд характерных особенностей больших и сложных систем: слабую структурированность теоретических и фактических знаний о системе и ее компонентах, физическую разнородность подсистем и компонентов, образующих систему, случайность и неопределенность факторов, действующих в системе, многокритериальность оценок качества функционирования системы.
Радиосистемы относятся к специфичному классу больших систем, что объясняется их информационной сущностью, статистическим характером связей между компонентами; это быстродействующие системы, в которых имеют место быстрые преобразования радиосигналов наряду со сравнительно медленно протекающими информационными процессами; это системы, находящиеся под постоянными случайными воздействиями.
Имитационное моделирование на ЭВМ является одним из важнейших инструментов изучения системы, позволяющим во многом преодолеть трудности, возникающие при их проектировании из-за перечисленных выше особенностей больших и сложных систем. Вычислительные эксперименты с математической моделью системы позволяют сделать выводы о поведении системы в различных ситуациях без ее построения, если это проектируемая система; без вмешательства в ее работу, если это действующая система, экспериментирование с которой дорого и небезопасно; без разрушения системы, если цель исследования состоит в определении предельных условий ее работы. Процесс моделирования системы включает построение модели, организацию вычислительных экспериментов с ней, организацию программного обеспечения моделирования.
Процесс построения модели состоит из ряда этапов, из которых можно выделить два: построение формальной аналитической или алгоритмической модели на основе знаний о моделируемой системе и формирование машинной модели по построенной формальной. Второй этап построения модели является предметом рассмотрения специалистов по программированию и здесь рассматриваться не будет. Построение же формальной модели системы производится ее разработчиком и представляет собой сложную научную задачу. В последнее время чаще используются алгоритмические формальные модели больших систем на основе специальных средств автоматизации системотехнического моделирования, в состав которых входят: язык описания моделируемых систем; средства обработки языковых конструкций языка описания (компилятор, транслятор или интерпретатор); управляющая программа моделирования, осуществляющая имитацию моделирования системы во времени; набор стандартных программных средств, используемых для организации вычислительных экспериментов с моделью. Такие специализированные средства моделирования обладают перед моделями, реализованными с помощью универсальных языков программирования, рядом преимуществ: меньшими затратами на программирование, возможностью использовать модели стандартных компонентов, автоматическим формированием данных, соответствующих принятому способу моделирования системы, и удобством их накопления и представления. Эти средства будут рассмотрены в последующих параграфах настоящей главы.
Вычислительные эксперименты с любой системой вообще и. радиотехнической в частности проводятся для получения информации о ее поведении, а эта информация довольно многообразна и характеризует различные стороны функционирования радиосистемы. На основании этой информации вычисляются показатели эффективности для системы, что представляет собой сложную задачу, которая решается на этапе организации вычислительных экспериментов и требует привлечения теории планирования эксперимента, статистики и других математических методов. В связи с тем, что радиосистемы работают в условиях действия случайных факторов, значения многих функционалов, характеризующих эффективность функционирования системы, могут оказаться случайными величинами. Поэтому при выборе показателей эффективности обычно пользуются средними значениями соответствующих функционалов, либо вероятностями совершения некоторых случайных событий, либо строятся совокупности функционалов, характеризующие свойства системы интегрально, такие, как помехозащищенность, надежность и т.п.
В качестве примера рассмотрим возможную оценку помехозащищенности радиосистемы. Пусть функционал  , i =1,..., п, является одним из показателей эффективности сложной системы и его значение
, i =1,..., п, является одним из показателей эффективности сложной системы и его значение  , найденное в результате моделирования, соответствует функционированию системы в условиях действия помех с заданными характеристиками, а значение
, найденное в результате моделирования, соответствует функционированию системы в условиях действия помех с заданными характеристиками, а значение  , также найденное в результате моделирования, относится к нормальным условиям функционирования системы, когда помехи отсутствуют. Тогда в качестве показателя помехозащищенности моделируемой системы α можно выбрать взвешенную сумму:
, также найденное в результате моделирования, относится к нормальным условиям функционирования системы, когда помехи отсутствуют. Тогда в качестве показателя помехозащищенности моделируемой системы α можно выбрать взвешенную сумму:
 ,
,
где  — коэффициенты, характеризующие важность того или иного показателя эффективности, определяемые разработчиком. Величина α будет показывать, насколько изменяется эффективность системы под влиянием помех с заданными характеристиками. В некоторых случаях в качестве могут выбираться показатели, соответствующие идеальному варианту системы, который определяется ограничениями на физическую реализуемость системы или отдельных ее компонентов и не может быть реализован на практике. Подробно вопросы выбора показателей эффективности систем при их моделировании и организации вычислительных экспериментов с моделями рассматриваются в [24].
— коэффициенты, характеризующие важность того или иного показателя эффективности, определяемые разработчиком. Величина α будет показывать, насколько изменяется эффективность системы под влиянием помех с заданными характеристиками. В некоторых случаях в качестве могут выбираться показатели, соответствующие идеальному варианту системы, который определяется ограничениями на физическую реализуемость системы или отдельных ее компонентов и не может быть реализован на практике. Подробно вопросы выбора показателей эффективности систем при их моделировании и организации вычислительных экспериментов с моделями рассматриваются в [24].
Проблемы организации программного обеспечения моделирования заключаются в необходимости учета множества разнообразных и противоречивых требований к программному обеспечению, таких, как структурированность программ, простота, совместимость с другими видами программного обеспечения, возможность генерирования случайных чисел и процессов и т.п. Перечисленные проблемы характерны не только применительно к моделированию систем, но и к программному обеспечению любого назначения, и для их изучения можно обратиться, например, к [2].
С точки зрения целевого назначения и описательных свойств различные уровни моделирования систем имеют свои характерные особенности. Можно выделить ряд характерных уровней моделирования радиосистем, каждому из которых соответствуют свои формальные модели системы. Отметим, прежде всего, следующие: модели потенциальной предельной достижимости, системотехнические модели, функциональные модели.
Модели потенциальной предельной достижимости характеризуют потенциальные возможности моделируемой радиосистемы в целом или отдельных ее подсистем и компонентов на основе изучения фундаментальных достижений науки в данной области.
Системотехнические или имитационные модели описывают функционирование системы в кибернетических терминах, с помощью этих моделей выполняется имитационное моделирование радиосистем. Термин «имитационное моделирование» означает, что при системотехнических моделях результат моделирования нельзя вычислить или предсказать заранее и необходим вычислительный эксперимент на модели, чтобы исследовать поведение проектируемой, системы.
Имитационные модели в свою очередь можно разделить на дискретно и непрерывно изменяющиеся. Эти определения, разумеется, относятся к поведению зависимых переменных модели, а не к самой системе. При дискретной имитации зависимые переменные изменяются дискретно в определенные моменты имитационного времени, называемые моментами совершения событий в системе. Время в такой имитационной модели может изменяться непрерывно или дискретно в зависимости от того, могут ли дискретные изменения зависимых переменных происходить в любые моменты времени или только в моменты совершения событий. Пример изменения зависимых переменных в дискретной имитационной модели показан на рис. 9.1, а. Модели дискретных систем обычно являются алгоритмическими.
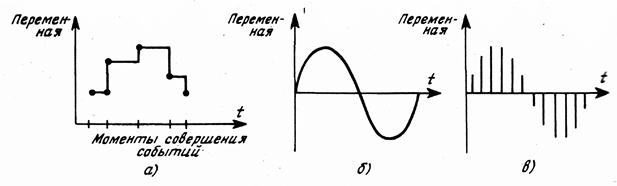
Рис. 9.1. Графическое представление отклика в имитационных моделях
При непрерывной имитационной модели зависимые переменные изменяются непрерывно в течение имитационного времени. Сама непрерывная имитационная модель системы может быть непрерывной во времени либо дискретной в зависимости от того, доступны ли значения зависимых переменных в любой момент времени или только в определенные моменты имитационного времени. Примеры изменения зависимых переменных при непрерывной имитации показаны на рис. 9.1, б, в. При непрерывной имитации обычно используются аналитические модели радиосистем в виде систем дифференциальных или нелинейных уравнений. Описанные в гл. 5 трудности решения таких систем при большом числе переменных привели к тому, что при моделировании радиосистем непрерывная имитация, как правило, не используется.
В ряде случаев применяются комбинированные модели, при которых зависимые переменные могут изменяться дискретно, непрерывно или непрерывно с наложенными дискретными скачками. Это позволяет организовать взаимодействие между дискретно и непрерывно изменяющимися переменными, с одной стороны, и понизить порядок решаемой системы дифференциальных уравнений — с другой, за счет дискретной имитации части зависимых переменных. В дальнейшем будем рассматривать только дискретные или комбинированные математические модели, как наиболее распространенные и имеющие наибольшую алгоритмическую поддержку.
В основу построения функциональных моделей радиосистем положены макромодели отдельных компонентов и подсистем. При классификации функциональных моделей радиосистем обычно учитывают способы получения и свойства макромоделей отдельных компонентов, а также способы описания сигналов и помех в системе. Подобные системные модели имеют большую конкретность по сравнению с имитационными и благодаря этому позволяют уточнять характеристики отдельных компонентов системы в процессе проектирования, а также изучать их влияние на работу системы в целом. Однако они требуют больших затрат на программирование и организации вычислительных экспериментов.

