 2015-01-13
2015-01-13 1871
1871Как указывалось в §9.1, при дискретном имитационном моделировании радиосистем воспроизводятся взаимодействия, и которых участвуют компоненты системы и которые приводят к изменению состояний компонентов и системы во времени в целом. Таким образом, дискретная имитация позволяет воспроизвести поведение моделируемой системы во времени, т.е. представить динамику ее функционирования. Для пояснения сущности алгоритмов дискретного имитационного моделирования уточним важные понятия «событие», «действие» и «процесс». Действие — это изменение состояния компонентов или системы в целом. Событие — начало или конец любого действия, т.е. при моделировании событие происходит в тот момент, когда принимается решение о начале или окончании какого-либо действия. Процесс — это упорядоченная во времени последовательность событий или действий, которая может включать несколько действий сразу. Взаимосвязь этих понятий поясняется рис. 9.4.
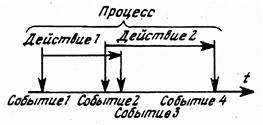
Рис. 9.4. Взаимосвязь между событиями, действиями и процессами
При дискретной имитации функционирования системы считается, что ее состояние может изменяться только в моменты времени совершения событий. Между этими моментами времени состояние системы и ее компонентов полагается неизменным. Для получения картины поведения системы во времени в модели организуется продвижение имитационного времени от одного события к другому при обязательном учете возможности параллельного выполнения в реальной системе нескольких действий сразу. Очевидно, что в алгоритмических реализациях моделей систем этот параллелизм действий может быть реализован лишь за счет последовательного обслуживания событий или действий, одновременно возникающих в разных компонентах реальной системы. Когда имитация одновременно появившихся событий в системе будет завершена и будут определены моменты совершения следующих событий, начала или завершения следующих действий или процессов, тогда производится сдвиг модельного времени до момента совершения ближайшего по времени события. По способу организации квазипараллелизма действий в имитационной модели различают четыре методологических подхода к построению дискретных моделей 
 систем: событийный подход; подход, ориентированный на действия, называемый часто подходом сканирования активностей; транзактный подход и процессорно-ориентированный подход. Рассмотрим эти подходы подробнее.
систем: событийный подход; подход, ориентированный на действия, называемый часто подходом сканирования активностей; транзактный подход и процессорно-ориентированный подход. Рассмотрим эти подходы подробнее.
Событийный подход к построению дискретных имитационных моделей. При этом подходе функционирование системы моделируется путем идентификации происходящих в ней изменений в моменты совершения событий. При этом предполагается, что с формальной точки зрения действия всех компонентов, приводящие к изменению состояния системы, одинаковы, связи между отдельными действиями, которые выполняются независимо одно от другого, отсутствуют, а в результате одних и тех же событий происходят одинаковые действия. В этом случае имитационная модель системы представляет собой набор процедур проверки возможности совершения событий, алгоритмов имитации выполнения действий и управляющей программы моделирования. Задача исследователя заключается в описании взаимосвязи событий между собой и временных характеристик действий различных компонентов системы. Имитация функционирования системы осуществляется путем выполнения упорядоченной во времени последовательности событий.
Перед началом имитации управляющая программа моделирования устанавливает начальные состояния моделей компонентов системы и задает начальные параметры, определяющие условия совершения событий и времени  , затем управление передается на программу проверки выполнимости условий совершения событий. В процедурах поверки появления события реализуется зависимость выполнения соответствующего этому событию действия от конкретной ситуации, имеющей место в реальной системе. Имена тех событий, для которых эти условия выполнены, заносятся в список инициализируемых, т.е. совершившихся, событий. Если этот список содержит хотя бы одно событие, то начинается последовательное выполнение процедур обслуживания событий, каждая из которых реализует алгоритм, имитирующий соответствующее действие компонента системы. В большинстве случаев имитация действия происходит путем временной задержки τ, равной времени совершения этого действия компонентом в реальной системе. Завершается работа алгоритма имитации действия оператором, который модифицирует значение момента совершения этого действия в будущем
, затем управление передается на программу проверки выполнимости условий совершения событий. В процедурах поверки появления события реализуется зависимость выполнения соответствующего этому событию действия от конкретной ситуации, имеющей место в реальной системе. Имена тех событий, для которых эти условия выполнены, заносятся в список инициализируемых, т.е. совершившихся, событий. Если этот список содержит хотя бы одно событие, то начинается последовательное выполнение процедур обслуживания событий, каждая из которых реализует алгоритм, имитирующий соответствующее действие компонента системы. В большинстве случаев имитация действия происходит путем временной задержки τ, равной времени совершения этого действия компонентом в реальной системе. Завершается работа алгоритма имитации действия оператором, который модифицирует значение момента совершения этого действия в будущем  и возвращает управление на выполнение следующей по порядку процедуры обслуживания событий, имя которой определяется управляющей программой моделирования.
и возвращает управление на выполнение следующей по порядку процедуры обслуживания событий, имя которой определяется управляющей программой моделирования.
Как только будут выполнены все процедуры обслуживания событий, находящихся в списке совершившихся событий, управляющая программа моделирования начинает корректировать модельное время. Корректировка осуществляется специальной подпрограммой, которая ищет в списке запланированных событий минимальное значение момента инициализации  , которое и становится новым значением модельного времени t. После корректировки модельного времени, если не выполняется условие завершения имитации, управление вновь передается на программу проверки выполнимости условий совершения событий и весь описанный процесс имитации функционирования системы повторяется вновь.
, которое и становится новым значением модельного времени t. После корректировки модельного времени, если не выполняется условие завершения имитации, управление вновь передается на программу проверки выполнимости условий совершения событий и весь описанный процесс имитации функционирования системы повторяется вновь.
Когда условие завершения имитации выполнено, она прекращается и управление передается подпрограмме, которая вычисляет результаты моделирования и выводит их исследователю.
Для иллюстрации событийного подхода к моделированию систем вновь рассмотрим оптическую систему связи, показанную на рис. 9.2.
Событийная модель в этом случае состоит из описания действий, происходящих в момент генерирования оптического импульса передатчиком, прихода импульса по оптическому каналу на фотоприемное устройство и, наконец, выдачи выходного электрического импульса с выхода фотоприемного устройства. Изменения состояния системы могут происходить только в моменты совершения этих событий, и имитация с использованием событий «генерирование оптического импульса», «достижение оптическим импульсом фотоприемника» и «выдача выходного электрического импульса» полностью обеспечивают воспроизведение динамики функционирования системы.
На первом шаге планируется генерирование очередного оптического импульса, что в ходе имитации при неоднократном обращении к процедуре обслуживания этого события позволяет организовать непрерывный поток информации, поступающий на вход оптической системы связи. Будем полагать, что эти события совершаются в моменты модельного времени t = ti.
Рассмотрим теперь логику второго события — достижение оптическим импульсом фотоприемника. Условиями совершения этого события, очевидно, являются наличие оптического импульса излучения, распространяющегося по оптическому каналу, т.е. совершение первого события,» и значение модельного времени, равное  , где ti — моменты совершения первого события, τ к — время распространения оптического излучения по каналу в идеальных условиях, равное
, где ti — моменты совершения первого события, τ к — время распространения оптического излучения по каналу в идеальных условиях, равное  . Процедура имитации действия, инициализированного этим событием, заключается во временной задержке второго события относительно первого на время τ к, т.е. время распространения оптического излучения по открытому оптическому каналу. Обычно оно распределено по гауссовому закону с математическим ожиданием τ к из-за флуктуации показателя преломления среды, обусловленных турбулентностью атмосферы.
. Процедура имитации действия, инициализированного этим событием, заключается во временной задержке второго события относительно первого на время τ к, т.е. время распространения оптического излучения по открытому оптическому каналу. Обычно оно распределено по гауссовому закону с математическим ожиданием τ к из-за флуктуации показателя преломления среды, обусловленных турбулентностью атмосферы.
Аналогично по логической взаимосвязи и третье событие — выдача фотоприемником выходного электрического импульса. Для того чтобы совершилось это событие, необходимо предварительное совершение второго события, т.е. появление оптического импульса на входе фотоприемника и модельного времени, равного  , где τ ф — время задержки срабатывания фотоприемного устройства, зависящее от многих внешних условий, в которых работает система, и обычно распределенное по закону Рэлея.
, где τ ф — время задержки срабатывания фотоприемного устройства, зависящее от многих внешних условий, в которых работает система, и обычно распределенное по закону Рэлея.
В ходе имитации по различным законам будет возникать первое событие «генерирование электрического импульса» и после выполнения остальных событий в упорядоченной во времени последовательности можно проверить пропадание импульсов в системе при больших скоростях передачи информации из-за нестабильности задержек в распространении оптического излучения и фотоприемного устройства.
Приведем описание алгоритма имитационного моделирования при событийном подходе.
Алгоритм 9.2. Имитационное моделирование систем способом составления расписания событий
Шаг 1. Устанавливаются начальные состояния компонентов системы и исходные значения параметров, определяющих инициализацию событий, устанавливается начальное значение модельного времени .
Шаг 2. Проверяются условия выполнимости всех событий и составляется список событий, для которых выполнены условия инициализации.
Шаг 3. Если список пустой, то переход к шагу 4, иначе передается управление на выполнение процедуры обслуживания первого события из списка, Модифицируется время совершения данного события в будущем  , и оно исключается из списка. Переход к шагу 2.
, и оно исключается из списка. Переход к шагу 2.
Шаг 4. В списке запланированных событий находится событие, имеющее минимальное время инициализации  , и корректируется модальное время, которое полагается равным этому моменту времени.
, и корректируется модальное время, которое полагается равным этому моменту времени.
Шаг 5. Проверяется условие окончания имитационного моделирования, если оно не выполняется, то переход к шагу 2.
Шаг 6. Оформляются результаты моделирования.
В настоящее время разработан ряд систем имитационного моделирования, обеспечивающих разработчика систем программными средствами для программирования последовательности событий, продвижения имитационного времени и описания инициализируемых событиями действий и взаимосвязи событий. Наиболее распространенными имитационными системами, ориентированными на событийный подход, являются GASP и SIMSCRIPT [24].
Подход сканирования активностей. При использовании этого подхода для имитации функционирования системы разработчик описывает действия, в которых участвуют компоненты системы, и задает условия начала и окончания этих действий. При этом полагается, что с формальной точки зрения действия компонентов системы, независимы друг от друга, могут быть различными, а условия их совершения могут быть представлены алгоритмически. В результате совершения действий в системе будут происходить различные события, которые заранее не планируются, а инициализируются по условиям, определенным для данного действия.
Имитационная модель системы представляет собой набор процедур, моделирующих действия, и процедур проверки выполнимости условий начала или завершения действий. Условия начала или окончания действий проверяются после очередного продвижения имитационного времени. Для того чтобы могло быть выполнено каждое действие в модели, проверка условий (сканирование) производится для всего множества действий при каждом продвижении имитационного времени.
Поясним упрощенно работу управляющей программы моделирования при имитации сканированием активностей. Перед началом имитации соответствующая подпрограмма устанавливает начальные состояния компонентов системы и задает начальные условия инициализации действий. Затем начинается проверка условий инициализации всех действий. Обычно эта проверка производится по параметрам модели либо по моментам модельного времени, когда должно начаться выполнение действия. По аналогии с событийным подходом составляется список действий, для которых выполнены условия инициализации, и затем управление поочередно передается процедурам, имитирующим эти действия. Каждая процедура, моделирующая действие, завершается вычислением момента времени следующей инициализации, а также параметров модели компонента, изменившихся в результате совершения действия. Все действия заносятся в список в соответствии с моментами их последующей инициализации.




 После окончания имитации всех инициализированных действий управляющая программа моделирования пересчитывает модельное время, принимая его равным минимальному значению момента инициализации действий.
После окончания имитации всех инициализированных действий управляющая программа моделирования пересчитывает модельное время, принимая его равным минимальному значению момента инициализации действий.
Если после корректировки модельного времени условие завершения имитации не выполняется, то управление имитацией вновь передается процедуре проверки условий инициализации действий.
Так как в результате выполнения алгоритмов, имитирующих действия, могут возникнуть условия для инициализации других действий, то в управляющей программе моделирования должны быть предусмотрены повторные циклы проверки выполнимости условий инициализации действий.
Обратимся вновь к рассмотрению примера — оптической системе связи, показанной на рис. 9.2. При моделировании ее методом сканирования действий можно выделить два основных действия: прохождение сигнала через оптический канал связи и выделение и преобразование оптического сигнала в электрический сигнал в фотоприемном устройстве.
Процедура имитации первого действия будет заключаться в задержке светового импульса на выходе оптического канала на время распространения  в соответствии с заданным распределением длительностей и ослаблению оптического сигнала по случайному, заданному заранее закону. Условие начала действия — появление сигнала на выходе оптического передатчика, условие окончания первого действия определяется по времени
в соответствии с заданным распределением длительностей и ослаблению оптического сигнала по случайному, заданному заранее закону. Условие начала действия — появление сигнала на выходе оптического передатчика, условие окончания первого действия определяется по времени  .
.
Второе действие по описанию имитирующей программы аналогично первому и заключается в пороговом обнаружении оптического сигнала, задержке его по заданному случайному закону  для имитации срабатывания фотодиода и усилителя и выдаче электрического сигнала на выход системы. Условие начала этого действия — завершение первого действия, т.е. появление оптического сигнала на входе приемного устройства, условие окончания определяется по модельному времени
для имитации срабатывания фотодиода и усилителя и выдаче электрического сигнала на выход системы. Условие начала этого действия — завершение первого действия, т.е. появление оптического сигнала на входе приемного устройства, условие окончания определяется по модельному времени  .
.
Так как здесь действия совершаются друг за другом, то модельное время будет продвигаться поочередно после имитации каждого из них.
Подход к имитационному моделированию систем сканированием активностей наиболее эффективен для моделирования систем, в которых продолжительность действия определяется в зависимости от состояния системы, что обеспечивает простую схему моделирования в информационных системах, частным случаем которых являются радиосистемы.
Приведем пошаговое описание алгоритма сканирования активностей.
Алгоритм 9.3. Имитационное моделирование системы сканированием активностей
Шаг I. Устанавливаются начальные состояния компонентов системы, параметров, определяющих условия инициализации действий, и начальное значение модельного времени .
Шаг 2. Для заданного момента модельного времени t производится проверка выполнения условий начала или завершения всех действий и составляется список действий, которые необходимо инициализировать.
Шаг 3. Если этот список пустой, то переход к шагу 4. иначе управление передается подпрограмме имитации первого действия из списка; определяется время совершения этого действия в будущем и затем оно исключается из списка инициализированных действий. Переход к шагу 2.
Шаг 4. Корректируется модельное время заменой текущего времени на время инициализации ближайшего действия  .
.
Шаг 5. Проверяется условие окончания процесса имитации; если оно не выполняется, то переход к шагу 2.
Шаг 6. Оформляются результаты моделирования.
Имитация функционирования радиосистем способом сканирования активностей требует больших временных затрат, чем при событийном подходе, однако такое моделирование позволяет получить больше информации о работе моделируемой системы. Из систем имитационного моделирования, ориентированных на данный подход, можно отметить CSL, SMPL.
Транзактный подход к организации дискретных имитационных моделей. В ряде случаев функциональные действия всех компонентов однотипны и представляют собой набор простейших операций, алгоритмы выполнения которых лишь изменяют временные координаты компонентов системы. При этом необходимо учитывать зависимость выполнения действий друг от друга. Такие процессы функционирования системы по своей сути являются процессами массового обслуживания [11, 25]. В виде процесса обслуживания могут быть представлены различные по своей природе процессы функционирования технических, производственных и других систем. Характерны для таких процессов случайное появление заявок на обслуживание, называемых транзактами, и завершение обслуживания в случайные моменты времени, т.е. стохастический характер процесса функционирования.
В любом элементарном процессе обслуживания всегда можно выделить две основные составляющие: ожидание обслуживания заявкой и собственно обслуживание. Элементарный прибор массового обслуживания показан на рис. 9.5 и состоит из накопителя заявок (Н), в котором может одновременно находиться, ожидая обслуживания, несколько транзактов; канала обслуживания заявок (К), в котором происходит задержка заявки на время обслуживания, имитирующая действие компонента, и который может управляться управляющими сигналами иу.
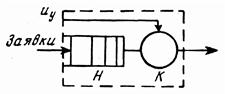
Р и с. 9.5. Простейший прибор обслуживания заявок
Кратко процесс функционирования элементарного прибора массового обслуживания вида рис. 9.5 можно описать следующим образом. Путем обращения к генератору случайных чисел с заданным законом распределения определяется длительность времени обслуживания транзакта в канале и вычисляется время окончания процесса обслуживания. До наступления этого момента модельного времени канал считается занятым и обслуживание следующей заявки не производится. При поступлении заявки на вход прибора она заносится в очередь на обслуживание в накопитель (Н), где и находится до начала обслуживания в канале (К). Таким образом, для каждого прибора массового обслуживания транзактный подход сочетает в себе черты событийного подхода и подхода сканированием активностей. Достоинством такого подхода является то, что логика событий в имитационной модели может быть заложена в самом имитационном языке.
Для описания имитационной модели радиосистемы имеется широкий набор стандартных приборов обслуживания, на которые декомпозируется модель системы. Схема соединения приоров отражает образование и уничтожение транзактов, занятие и освобождение ими приборов массового обслуживания, управление движением транзактов в системе, имитацию задержек в продвижении транзактов и по виду близка к структуре моделируемой системы.
Алгоритм работы имитационной модели при транзактном подходе состоит в следующем. В начале моделирования управляющая программа устанавливает приборы обслуживания и модельное время в начальное состояние. Затем управление передается программе проверки источников транзактов. Эта программа просматривает условия создания новых транзактом каждым источником, и при их выполнении подпрограмма создания транзактов генерирует новые транзакты и помещает их в список активизированных транзактов для данного момента модельного времени t. Затем управление имитацией передается программе уничтожения транзактов, которая просматривает очереди транзактов и выбирает те, чье время пребывания в модели истекло. Эти транзакты также помещаются в список активизированных. Когда просмотрены все вновь генерируемые и уничтожаемые транзакты, подпрограмма инициализации начинает поиск транзактов, завершивших к моменту t пребывание в канале какого-либо прибора массового обслуживания либо поступившего в очередь на обслуживание в накопитель прибора. Эти транзакты дополняют список активизированных.
Если в списке активизированных имеется хотя бы один гранзакт, то управляющая программа моделирования передает управление подпрограмме обслуживания транзактов. Эта подпрограмма находит по списку активизированных транзактов адрес прибора, в канале которого завершилось обслуживание транзакта, выбирает из очереди к этому каналу новый транзакт и закрепляет за ним освободившийся канал, определяя при этом момент будущей активизации транзакта при освобождении им канала:  , где — время выполнения действия, которое имитируется обслуживанием транзактов этим каналом. После того как все транзакты, обслуживание которых зaвершилось, освободят каналы и произойдет передвижка очередей транзактов, управление передается программе передвижения транзактов. Эта подпрограмма определяет адрес прибора обслуживания, на который должен поступить обслуженный гранзакт, и организует его перемещение по схеме модели. Если канал прибора, на который поступает транзакт, свободен, то гранзакт его занимает, при этом определяется время завершения обслуживания транзакта каналом, если же канал занят, то транзакт поступает в очередь на обслуживание к нему в соответствии со своим приоритетом. Если транзакт поступает на уничтожение, то специальная программа формирует статистику пребывания транзакта в модели системы.
, где — время выполнения действия, которое имитируется обслуживанием транзактов этим каналом. После того как все транзакты, обслуживание которых зaвершилось, освободят каналы и произойдет передвижка очередей транзактов, управление передается программе передвижения транзактов. Эта подпрограмма определяет адрес прибора обслуживания, на который должен поступить обслуженный гранзакт, и организует его перемещение по схеме модели. Если канал прибора, на который поступает транзакт, свободен, то гранзакт его занимает, при этом определяется время завершения обслуживания транзакта каналом, если же канал занят, то транзакт поступает в очередь на обслуживание к нему в соответствии со своим приоритетом. Если транзакт поступает на уничтожение, то специальная программа формирует статистику пребывания транзакта в модели системы.
Для оптической системы связи имитационная модель при транзактном подходе может быть представлена в виде четырех приборов массового обслуживания, как показано на рис. 9.6.

Рис. 9.6. Транзактная имитационная модель системы связи
На вход первого прибора, имитирующего оптический передатчик, поступают по случайному во времени закону транзакты, атрибут которых случайным образом помечается символами логического нуля или единицы, чтобы имитировать передаваемую цифровую информацию.
Второй прибор имитирует оптический канал. В этом приборе время обслуживания каждого транзакта каналом равно времени распространения сигнала по каналу минус время ожидания обслуживания в накопителе. Время обслуживания можно изменять случайным образом, чтобы имитировать распространение оптического излучения в турбулентной атмосфере.
Третий и четвертый приборы имитируют фотоприемное устройство. В них отсутствуют накопители, а транзакт после окончания обслуживания в канале третьего прибора приобретает дополнительную случайную задержку, имитирующую время срабатывания фотоприемного устройства. Четвертый прибор представляет собой логический переключатель, который направляет транзакт на уничтожение по различным путям в зависимости от того, помечен ли атрибут транзакта логическим нулем или единицей в первом приборе.
Описание этой модели операторами языков логического моделирования не представляет трудности.
Алгоритм 9.4. Имитационное моделирование систем при транзактном noдxoде\
Шаг 1. Производится начальная установка приборов и модельного времени.
Шаг 2. Передается управление программе сканирования источников транзактов, которая проверяет условия создания новых транзактов и генерирует их с требуемыми характеристиками. Формируется список активизированных транзактов.
Шаг 3. Передается управление программе уничтожения транзактов. Форми руется список уничтожаемых транзактов, корректируется список активизированных транзактов.
Шаг 4. Передается управление программе инициализации транзактов в прибоpax массового обслуживания, корректируется список активизированных транзактов.
Шаг 5. Проверяется список активизированных транзактов, если список пуп, то переход к шагу 7, иначе передача управления программе обслуживания трап зактов.
Шаг 6. Передача управления программе продвижения транзактов.
Шаг 7. Из списка моментов активизации транзактов выбирается минимальное время, модельное время полагается равным этому времени.
Шаг 8. Если условие окончания моделирования не выполняется, то переход и шагу 2.
Шаг 9. Оформление результатов моделирования.
Как видно из описания алгоритма работы управляющей программы моделирования, при сравнительной простоте описания имитационной модели системы при транзактном подходе появляются дополнительные расходы машинного времени на просмотр транзактов и приборов по сравнению с двумя предыдущими подходами.
Несмотря на этот недостаток, транзактный подход в настоящее время широко используется для моделирования систем различного назначения. Наиболее распространенными системами имитационного моделирования, ориентированными на транзактный подход, являются GPSS, SIMULA, Q-GERT и др.
Процессорно-ориентированный подход к построению дискретных имитационных моделей. Этот подход используется, когда функциональные действия различных компонентов системы неодинаковы, причем у каждого компонента может существовать своя последовательность элементарных действий, которые последовательно выполняются во времени. Это позволяет рассматривать функционирование компонента системы как единый процесс, а всю имитационную модель представить ввиде набора описаний процессов и информационных и управляющих связей между ними.
Так как в процессы объединяются действия, которые определяют функционирование одного компонента модели, то имеет место полное соответствие компонентов физической системы и ее имитационной модели, что делает такие модели особенно наглядными и удобными для поиска узких мест в работе системы.
Рассмотрим упрощенную схему работы управляющей программы моделирования при процессорно-ориентированном подходе к имитационному моделированию. После установки начального состояния имитационной модели и начального имитационного времени управляющая программа моделирования составляет список активизированных процессов, для действий которых время активизации  . Далее управляющая программа выбирает первый из активизированных процессов и проверяет выполнение условий начала или окончания действия из этого процесса, для которого истекло время ожидания. Если эти условия выполняются, то управление передается подпрограмме, имитирующей данное функциональное действие. Работа подпрограммы, имитирующей действие, завершается модификацией времени следующей активизации этого действия
. Далее управляющая программа выбирает первый из активизированных процессов и проверяет выполнение условий начала или окончания действия из этого процесса, для которого истекло время ожидания. Если эти условия выполняются, то управление передается подпрограмме, имитирующей данное функциональное действие. Работа подпрограммы, имитирующей действие, завершается модификацией времени следующей активизации этого действия  , где
, где  — сдвиг времени. Если после завершения работы подпрограммы имитации действия выполняются условия для совершения следующего действия этого же процесса, то управление передается подпрограмме, имитирующей последующее действие, и т.д. до окончания процесса. После того как будут выполнены все действия выбранного ранее активизированного процесса, начинается проверка условий выполнения действий из следующего активизированного процесса и т.д. Когда будут выполнены подпрограммы имитации действий всех активизированных процессов, управляющая программа моделирования осуществляет сдвиг модельного времени. За новое модельное время принимается минимальное время новой активизации действий, и далее процесс имитации повторяется. Запишем этот процесс пошагово.
— сдвиг времени. Если после завершения работы подпрограммы имитации действия выполняются условия для совершения следующего действия этого же процесса, то управление передается подпрограмме, имитирующей последующее действие, и т.д. до окончания процесса. После того как будут выполнены все действия выбранного ранее активизированного процесса, начинается проверка условий выполнения действий из следующего активизированного процесса и т.д. Когда будут выполнены подпрограммы имитации действий всех активизированных процессов, управляющая программа моделирования осуществляет сдвиг модельного времени. За новое модельное время принимается минимальное время новой активизации действий, и далее процесс имитации повторяется. Запишем этот процесс пошагово.
Алгоритм 9.5. Имитационное моделирование системы процессорно-ориентированным подходом
Шаг 1. Устанавливаются начальные состояния процессов и начальное модельное время .
Шаг 2. Поверяется список активизированных процессов. Если список пуст, то переход к шагу 4.
Шаг 3. Выбирается первый элемент списка активизированных процессов и управление передается подпрограммам имитации действий этого процесса, для которых выполнены условия совершения. После завершения работы подпрограмм имитации действий устанавливается новое время их активизации и данный процесс исключается из списка активизированных. Переход к шагу 2.
Шаг 4. Осуществляется сдвиг модельного времени, которое выбирается равным минимальному времени активизации процессов: 
Шаг 5. Проверяется условие завершения моделирования. Если условие выполнено, то переход к шагу 6, иначе формируется список активизированных процессов, в который заносятся все процессы, время активизации действий в которых , и располагаются в списке согласно приоритетам процессов. Переход к шагу 2.
Шаг 6. Оформляются результаты моделирования.
Очевидно, что в рассматриваемом ранее примере оптической системы связи (см. рис. 9.2) работа системы представляеся в виде одного процесса из ряда последовательных действий, имитирующих работу оптического передатчика, канала связи и фотоприемного устройства.
При процессорном способе имитации близость модели к физической системе облегчает отладку модели и введение допущений, что особенно удобно для проектирования, когда приходится вносить в модель много изменений и дополнений. Особенно эти преимущества сказываются по мере роста размером модели. Из систем моделирования, использующих для описания реальных объектов процессы, можно отметить СЛАМ, PLSIM, SOL, ASPOL, DISLIN и др.

