 2015-03-27
2015-03-27 254
254ПРОГРАММИРОВАНИЕ
И ОСНОВЫ АЛГОРИТМИЗАЦИИ
Методические указания
к выполнению курсовой работы
для студентов очной формы обучения по направлению подготовки
221000.62 – «Мехатроника и робототехника»
Брянск 2015
УДК 621.9
Программирование и основы алгоритмизации [Текст]+ [Электронный ресурс]: методические указания к выполнению курсовой работы для студентов очной формы обучения по направлению 221000.62 – «Мехатроника и робототехника». – Брянск: БГТУ, 2015. – 26 с.
Разработал: О.Н. Крахмалев, канд. техн. наук
Рекомендовано кафедрой «Автоматизированные технологические системы» БГТУ (протокол №8 от 16.10. 2014).
ВВЕДЕНИЕ
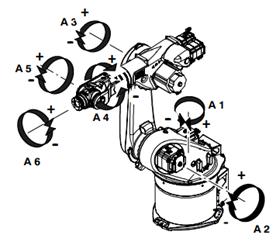
 В промышленных роботах исполнительные механизмы представляют собой манипуляторы, звенья которых могут совершать поступательные или вращательные движения относительно опорных для них звеньев. Опорным для данного звена считается звено, соединяющее его через цепь других звеньев с неподвижным основанием. Например, звенья манипулятора промышленного робота KR 30 могут совершать относительные вращательные движения по угловым координатам Аk, k = 1…6 (рис. 1.12).
В промышленных роботах исполнительные механизмы представляют собой манипуляторы, звенья которых могут совершать поступательные или вращательные движения относительно опорных для них звеньев. Опорным для данного звена считается звено, соединяющее его через цепь других звеньев с неподвижным основанием. Например, звенья манипулятора промышленного робота KR 30 могут совершать относительные вращательные движения по угловым координатам Аk, k = 1…6 (рис. 1.12).
 Манипуляторы с установленными на них приводами рассматривают как манипуляционные системы. Манипуляционные системы (МС) – это разомкнутые многозвенные механические системы, звенья в которых последовательно соединены между собой шарнирами. Шарниры в манипуляционных системах, как правило, имеют одну степень свободы, поэтому в кинематических схемах они изображаются кинематическими парами 5-го класса [1, 2].
Манипуляторы с установленными на них приводами рассматривают как манипуляционные системы. Манипуляционные системы (МС) – это разомкнутые многозвенные механические системы, звенья в которых последовательно соединены между собой шарнирами. Шарниры в манипуляционных системах, как правило, имеют одну степень свободы, поэтому в кинематических схемах они изображаются кинематическими парами 5-го класса [1, 2].
Кинематическая пара – это подвижное соединение двух звеньев, накладывающее определённые связи, ограничивающие степени свободы относительных перемещений этих звеньев. Количество ограниченных кинематической парой степеней свободы определяет класс кинематической пары. Поскольку свободное тело имеет в пространстве шесть степеней свободы, то кинематической паре 5-го класса соответствует одна степень свободы относительных перемещений соединяемых ею звеньев.
Геометрическими моделями называют математические модели позволяющие построить изображение моделируемого объекта или системы на плоскости или в трёхмерном пространстве, в последнем случае изображение называют 3D-моделью объекта (системы).
Геометрические модели многозвенных механических систем могут быть получены, например, на основе методики изложенной в монографии [1]. Преимуществом подхода, реализованного в данной методике, является то, что составленная по этой методике геометрическая модель манипуляционных систем роботов позволяет разделить параметры многозвенной механической системы, описывающие геометрию звеньев, и параметры, описывающие их относительное движение.








