 2015-03-27
2015-03-27 1708
17083.1. МЕТОДИКА
Положение твёрдого тела в пространстве может быть определено по положению системы координат, связанной с этим телом. Положение связанной с телом системы координат относительно неподвижной системы определяется радиус-вектором её начала, имеющим три независимых проекции, и тремя углами между соответствующими осями систем координат. Таким образом, твёрдое тело представляет собой в общем случае механическую систему с шестью степенями свободы. При наличии связей, ограничивающих движение тела, число степеней свободы уменьшается.
Так как манипуляционные системы представляют собой разомкнутые кинематические цепи, состоящие из жёстких (абсолютно твёрдых) звеньев, соединённых между собой кинематическими парами пятого класса, имеющими одну степень свободы, то каждое звено такой манипуляционной системы, кроме последнего, входит в две кинематические пары. Поэтому целесообразно с каждым звеном связать две системы координат, поместив их начала в центрах этих кинематических пар. Выберем направление нумерации звеньев от основания манипуляционной системы [1].
В центре кинематической пары, соединяющей i -е и (i –1)-е звенья, поместим систему координат Si, ось Zi которойнаправим вдоль оси относительного движения i -го и (i –1)-го звеньев. Если эта ось перпендикулярна прямой, соединяющей центры кинематических пар i -го звена, то ось Xi направляется по этой прямой. В центре кинематической пары i -го и (i +1)-го звеньев поместим систему координат Si*. Оси Xi*, Yi* и Zi* направим так, чтобы системы Si* и S ( i+ 1) совпадали в исходном положении манипуляционной системы (рис. 2).
В характерной точке выходного звена, схвата или рабочего инструмента, поместим начало системы координат Sn *, n – число звеньев манипуляционной системы. Ось Zn* расположим в продольном направлении по оси симметрии схвата, а ось Xn* в его плоскости симметрии. Орты этой системы координат определяют ориентацию схвата в пространстве (рис. 3).
Для описания рабочего пространства и движения многозвенной механической системы в этом пространстве используют неподвижную системе координат S 0, а для описания положения многозвенной механической системы будем использовать систему координат S 0*, жёстко связанную с её неподвижным основанием. Начало системы координат S 0* поместим в центр первой кинематической пары, а оси этой системы координат направим аналогично осям систем координат Si* (рис. 4).
Задание систем координат S 0, S 0*, Si, Si* и Sn *, связываемых со звеньями, позволяет описать рабочее пространство, траектории движения характерных точек и разнообразные конфигурации многозвенных механических систем.
Следует отметить, что для однозначного описания положения многозвенных механических систем было бы достаточно связать с каждым её звеном одну систему координат, однако использование двух систем координат, связываемых с каждым звеном, позволяет разделить параметры многозвенных механических систем, описывающие геометрию звеньев, и параметры, описывающие их относительное позиционирование.
Существует Межгосударственный стандарт ГОСТ 30097–93 «Роботы промышленные (Системы координат и направления движений)».
Относительное положение связанных систем координат Si и Si*, i = 1… n может быть определено матрицей преобразования однородных координат, имеющей размерность 4×4.
 , (1)
, (1)
где cos(Xi, Xi*) и т.д. – косинусы углов между соответствующими осями координат, являются элементами матрицы поворота Mi, имеющей размерность(3×3); Li = [ lxi, lyi, lzi ] T – координаты начала системы Si* в системе Si.
В исходном положении многозвенная механическая система задаётся матрицами Mi, i = 1… n. Элементы матрицы Mi определяют ориентацию системы Si* в системе координат Si в исходном положении (до начала движения). Если за исходное положение принимается прямолинейная или ломаная под прямыми углами конфигурация многозвенной механической системы, то компоненты матрицы Mi принимают значения 0 или 1.
Массив, состоящий из n матриц, определяемых выражением (1), представляет собой неизменяющуюся часть геометрической модели манипуляционных систем.
Так как за ось относительного движения i -го и (i –1)-го звеньев выбрана ось Zi, матрица, определяющая положение системы Si относительно системы S ( i –1) * , будет иметь вид
 , (2)
, (2)
где qi – i -я обобщённая координата,
 1, если кинематическая пара вращательная;
1, если кинематическая пара вращательная;
β i = (3)
0 – если поступательная.
При составлении матрицы A ( i –1) *, i, i = 1… n необходимо учитывать правило знаков для обобщённых координат:
– i -я вращательная обобщённая координата считается положительной, если отсчёт её от исходного положения многозвенной механической системы ведётся так, что для совмещения систем S ( i –1) * и Si систему Si необходимо повернуть вокруг оси Zi на угол qi против хода часовой стрелки;
– i- я поступательная обобщённая координата считается положительной, если отсчёт её от исходного положения многозвенной механической системы ведётся в положительном направлении оси Zi.
Матрица  , определяющая относительное положение двух соседних звеньев, может быть представлена произведением матриц:
, определяющая относительное положение двух соседних звеньев, может быть представлена произведением матриц:
A ( i –1), i = A ( i –1), ( i –1) * A ( i –1) *, i. (4)
Матрица преобразования однородных координат из системы Sk, связанной с k -м звеном, в неподвижную систему S 0 может быть определена как последовательность произведений матриц  , i = 1… n:
, i = 1… n:
k
A 0, k = A 0,1 A 1,2 …A (i –1), i Ai ,(i+ 1) …A (k –1), k = П A (i –1), i . (5)
i = 1
Массивы матриц, определяемых выражениями (2)–(5), представляют собой изменяющуюся часть геометрической модели манипуляционных систем.
Для составления матриц определяемых выражениями (1) и (2) необходимы исходные данные, описывающие геометрию многозвенной механической системы. Такими исходными данными являются:
n – число степеней свободы манипулятора;
P – массив, определяющий вид и последовательность расположения кинематических пар;
L – массив векторов, содержащих координаты начал систем Si* в соответствующих системах координат Si.;
M – массив матриц, определяющих ориентацию систем Si* в соответствующих системах координат Si,в исходном положении.
Число степеней свободы n представляет собой число кинематических пар, является константой и определяется конструктивным исполнением манипуляционной системы.
Массив P представляет собой последовательные коды кинематических пар. Вращательной кинематической паре, в которой ось вращения перпендикулярна плоскости звеньев, соответствует код-1, вращательной кинематической паре с осью вращения, совпадающей с одним из звеньев, соответствует код-2, поступательной паре соответствует код-3. Изображение используемых кинематических пар и соответствующие им коды представлены на рис. 5.
Размеры звеньев и виды кинематических пар используются для составления массива векторов L. В общем случае векторы Li, i =(1,…, n), составляющие массив L, имеют вид
Li = [ lxi, lyi , lzi ] T,
где lx i, ly i и lz i – координаты начала системы Si*, связанной с конечной точкой звена, в системе координат Si, расположенной в начале звена.
Часто звенья манипуляционных систем моделируются прямолинейными стержнями, тогда:
Li = [ li,0, 0] T, если Pi = 1,
Li = [ 0, 0, li ] T, если Pi = 2 или 3,
где l i – длина i -го звена.
Таким образом, рассмотрена методика моделирования геометрии манипуляционных систем, позволяющая составить геометрическую модель манипуляционных систем. Методика основана на применении двух систем координат, связанных с каждым подвижным звеном, матрицах преобразования однородных координат (1) и (2), однозначно определяющих положение манипуляционной системы в пространстве и исходных данных, необходимых для описания геометрии манипуляционной системы в пространстве.
3.2. ПРИМЕР
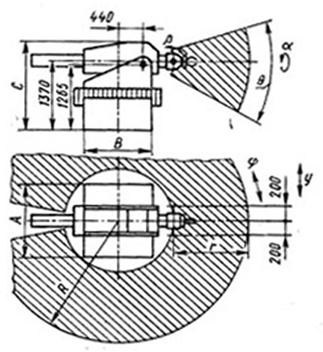
Рассмотрим применение изложенной методики моделирования геометрии манипуляционных систем на примере трёхзвенной манипуляционной системы промышленного робота (ПР) «Универсал-15» (рис.6). Кинематическая схема этого робота представлена на рис. 7.
|
|
Исходными данными, описывающими геометрическую модель ПР «Универсал -15» являются:
n = 3 – число звеньев манипуляционной системы;
P = [2, 1, 3] T – вектор задающий вид и последовательность кинематических пар, образующих исследуемую манипуляционную систему;
L = [(0, 0, l1); (l2, 0, 0); (0, 0, l3)]– массив векторов определяющих форму звеньев.
Матрицы Mi (i= 0,…,3), определяющие конфигурацию манипуляционной системы в исходном положении, имеют вид (см. табл. 2 прил. 2)
 ,
,  ,
,  ,
,  .
.
Матрицы преобразования однородных координат Aii*,описывающие взаимное положение систем координат Si и Si* (i =0,…,3), связываемых с каждым звеном манипуляционной системы, имеют блочную структуру и собираются из соответствующих им подматриц Mi и векторов Li
 .
.
Матрицы преобразования однородных координат A ( i –1) * i, описывающие взаимное положение систем координат Si и S ( i –1) * (i =0,…,3), будут иметь вид
 .
.
Коэффициенты βi (i= 1,…,3) определяются на основании вектора P, задающего вид и последовательность кинематических пар. В нашем примере значения этих коэффициентов задаются массивом
β = [1, 1, 0].
Матрицы преобразования однородных координат A ( i –1), i, описывающие переход из системы координат Si, связанной с i - м звеном, в систему координат Si –1, связанную с (i –1) - м звеном, и определяемые произведением A ( i –1), i = A ( i – 1),( i – 1)* A ( i – 1)*, i (i= 1,…,3), будут иметь вид
 ,
,
 ,
,
 .
.
Матрица, определяющая положение характерной точки рабочего органа (схвата), в системе координат, связанной с третьим звеном S 3имеет вид
 .
.
Матрицы преобразования однородных координат A 0, i, описывающие переход из системы координат Si, связанной с i - м звеном (i= 1,…,3), в неподвижную систему координат S 0,
 ,
,
 ,
,

Таким образом, на основе исходных данных, описывающих геометрию манипуляционной системы ПР «Универсал-15», сформированы матрицы, определяющие неизменяемую и изменяемую части геометрической модели данной манипуляционной системы.

