 2015-03-20
2015-03-20 530
530S 1 Ç S 2 = m
S 1 - коническая поверхность вращения
S 2 - сфера.
1) G 1 || P2; G1 Î 0, G Î S
2) G1 Ç S 1 = a1
 (а12 - очерк конуса на P2)
G1 Ç S 2 = b1
(b12 - очерк сферы на P2)
3) а1 Ç b1 ={ 1, 2 }Þ
Þ (точки пересечения
очерков поверхностей на P2 ),
т. 1 и 2 гр.
1) G2 Î 0, G2 || P1
2) G2 Ç S 1 = а2
Г2 Ç S 2 = b2
3) а2 Ç b2 ={ 3,4 } Þ
точки 1 и 2 группы
1) G i || P1;
2) G i Ç S 1 = а i
G i Ç S 2 = bi;
3) аi Ç bi ={ 5,6 } Þ
Þ точки 3 группы (а12 - очерк конуса на P2)
G1 Ç S 2 = b1
(b12 - очерк сферы на P2)
3) а1 Ç b1 ={ 1, 2 }Þ
Þ (точки пересечения
очерков поверхностей на P2 ),
т. 1 и 2 гр.
1) G2 Î 0, G2 || P1
2) G2 Ç S 1 = а2
Г2 Ç S 2 = b2
3) а2 Ç b2 ={ 3,4 } Þ
точки 1 и 2 группы
1) G i || P1;
2) G i Ç S 1 = а i
G i Ç S 2 = bi;
3) аi Ç bi ={ 5,6 } Þ
Þ точки 3 группы
| 
|
Рисунок 6.15
Опорные точки (пл. Г1) 1 и 2 являются наивысшей и низшей точками линии пересечения, а также точками видимости линий на плоскости П2.
Все промежуточные точки строятся с помощью вспомогательных секущих горизонтальных плоскостей уровня Г i, расположенных равномерно между ними.
Если пересекающиеся поверхности вращения не имеют общей фронтальной плоскости симметрии, то самую высшую и самую низкую точки линии пересечения поверхностей определяют, построив изображения этих поверхностей на плоскость П4, параллельную осевой плоскости.
Вспомогательную плоскость Г2 берем на уровне экватора сферы. Полученные точки 3 и 4 определяют видимость линии пересечения относительно плоскости П1.
Графически простые линии пересечения (окружности) на данных поверхностях получаются от пересечения их горизонтальными плоскостями уровня Г i.
Вводя равномерно между наивысшей и низшей точками линии пересечения вспомогательные секущие плоскости, можно получить достаточное количество промежуточных точек построения линии пересечения.
Горизонтальная проекция линии пересечения строится по принадлежности ее точек конической поверхности.
Аналогично решаются задачи на взаимное пересечение плоскостей и поверхностей вращения из 3 группы позиционных задач (см. рис. 6.16 а-е).
а)  б)
б) 
в) 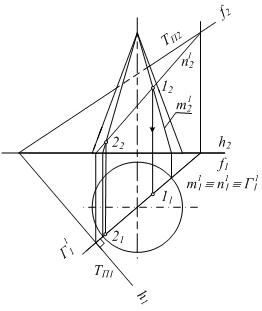 г)
г) 
д) 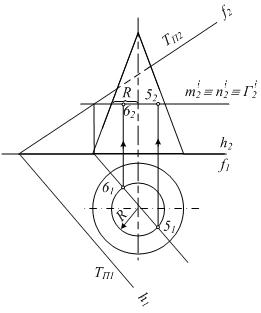 е)
е) 
Рисунок 6.16
6.5.2 Способ концентрических сфер
Для обоснования применения сфер, как вспомогательных секущих поверхностей, рассмотрим свойства соосных поверхностей.








