 2015-04-08
2015-04-08 2355
2355Автоматические транспортно-накопительные модули осуществляют необходимое распределение транспортных потоков в пространстве и времени, обеспечивающее заданный темп работы как ГПМ, так и ГПС в целом.
Транспортные потоки ГПС можно разделить на непрерывные и периодические, и соответственно, автоматические транспортные средства - на средства для непрерывного и периодического перемещения. В реальной транспортной системе ГПС, как правило, осуществляется комбинированное использование непрерывного и периодического перемещений при условии разрыва транспортных средств буферными накопителями или использование в качестве накопителей самих транспортных средств.
Применяемость транспортно-накопительных систем обусловливается особенностями компоновок с учетом реального расположения ГПМ.
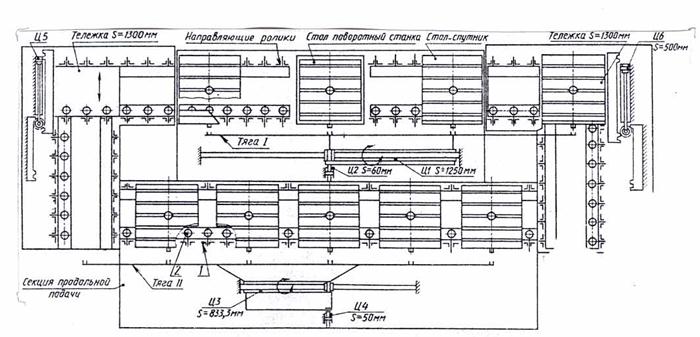
Рисунок 12.16 — Схема транспортно-накопительного устройства ГПМ на базе станка
МЦ 800
Схема транспортно-накопительного устройства ГПМ на базе МЦ 800 показана на рисунке 12.16. Перемещение столов-спутников на один шаг в продольных секциях конвейера осуществляется гидроцилиндрами Ц1 и Ц3 после предварительной расфиксации столов-спутников. В конце перемещения все столы-спутники стопорятся в очередной позиции гидрофиксаторами Ц2 (Ц4). Перемещение столов-спутников в поперечных секциях осуществляется на тележках, приводимых гидроцилиндрами Ц5 и Ц6. Вместе со штоком каждого из этих гидроцилиндров перемещается зубчатое колесо, катящееся по неподвижной зубчатой рейке, и приводящее в движение другую рейку, закрепленную на тележке. При ходе штока цилиндра, равном 500 мм, тележка при данной схеме механизма привода перемещается на 1300 мм.
В автоматизированной транспортно-складской системе деталей (спутников) АТС-2 используются приемно-передающие агрегаты (рисунки 12.17, 12.18), предназначенные для автоматической загрузки спутников с обрабатываемыми заготовками на станках, а также являющиеся буферными накопителями спутников непосредственно у станков и на рабочих местах операторов позиций «Загрузка», «Разгрузка», «Контроль».
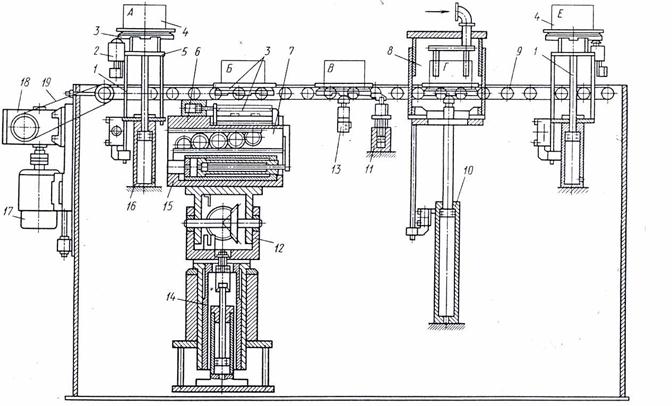
Рисунок 12.17 — Кинематическая схема приемно-передающего агрегата спутников АТС-2:
1 — механизмы приемки спутников; 2,13 — конечные выключатели
контроля спутников на позициях; 3 — спутник; 4 — заготовка;
5 — платформа с ложементами для ориентации спутника; 6 — платформа
телескопического стола; 7 — телескопический стол; 8 — камера очистки
спутников с заготовками; 9 — ролик конвейера; 10 — механизм подъема и
опускания шторок камеры; 11 — механизм останова спутника на позиции;
12 — кантователь; 14 — механизм подъема и поворота манипулятора;
15 — манипулятор; 16 — гидроцилиндр; 17 — электродвигатель;
18 — редуктор; 19 — цепная передача конвейера
В качестве примера накопителя спутников с устройством их смены и подачи разнотипных заготовок в произвольной последовательности приведен пример ГПМ (рисунок 12.19), предназначенного для продолжительной работы по безлюдной технологии.
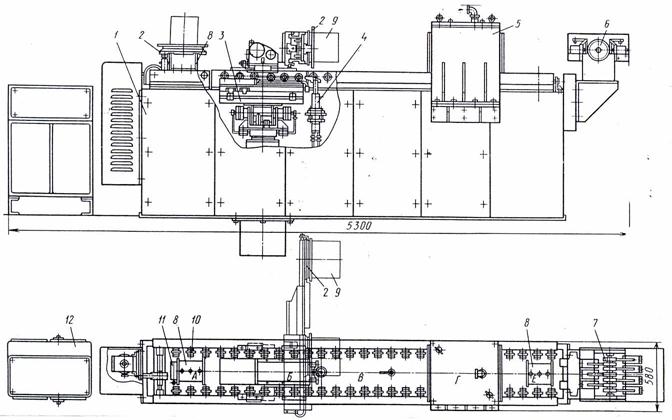
Рисунок 12.18 — Приемно-передающий агрегат спутников АТС-2: 1 — корпус; 2 — спутник;
3 — манипулятор; 4 — механизм останова спутника на позиции; 5 — камера для
очистки спутников с обрабатываемыми заготовками; 6 — командоаппарат;
7 — дисковые кулачки; 8 — механизм приемки спутников; 9 — заготовка;
10 — роликовый конвейер; 11 — устройство считывания кода спутника;
12 — пульт управления агрегатом
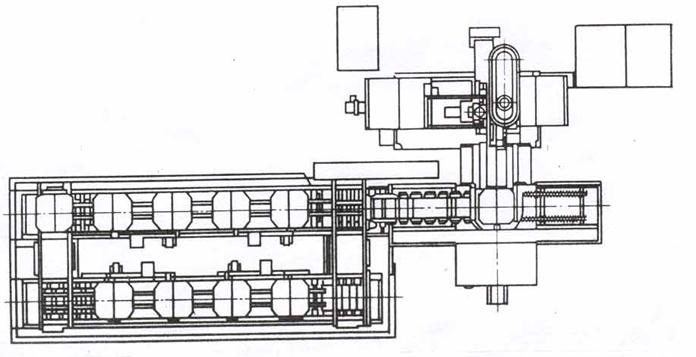
Рисунок 12.19 — Накопитель спутников многоцелевого станка
Производственный модуль фирмы «Бурхард и Вебер» со сменными многошпиндельными коробками (рисунок 12.20) позволяет вести независимую обработку с двух сторон (расточку и фрезерование). Гибкость модуля зависит от емкости накопителя шпиндельных коробок.
Накопитель спутников с цепным конвейером японской фирмы «Hitachi Seiki» показан на рисунке 12.21.
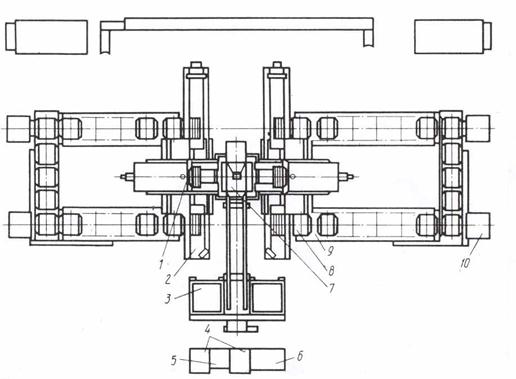
Рисунок 12.20 — Станок со сменными многошпиндельными коробками фирмы
«Бурхард и Вебер»: 1 — силовой узел; 2 — устройство смены коробок;
3 — устройство смены спутников; 4 — система ЧПУ; 5 — главный пульт
управления; 6 — система диагностики; 7 — стол; 8 — коробка; 9 — накопитель
коробок; 10 — позиция загрузки-разгрузки коробок
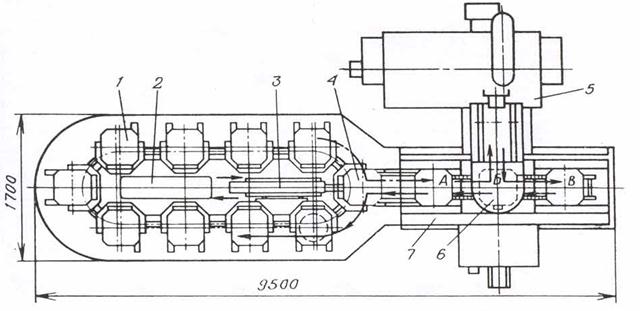
Рисунок 12.21 — Накопитель спутников цепной конструкции фирмы «Hitachi Seiki» (Япония):
1 — конвейер-накопитель; 2 — привод; 3 — механизм подачи; 4 — спутник;
5 — многооперационный станок; 6 — стол станка; 7 — челночное устройство
Роликовые конвейеры-накопители и роликовые буферные накопители используются в американском ГПМ фирмы «Cincinnati Milarcron» (рисунок 12.22).
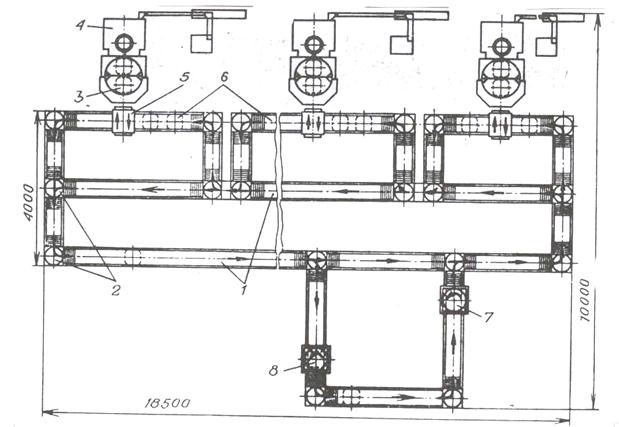
Рисунок 12.22 — Транспортно-накопительная система спутников станочного комплекса фирмы
«Cincinnati Milarcron» (США): 1 — роликовый конвейер-накопитель;
2 — поворотные приемно-передающие устройства; 3 — позиция ожидания;
4 — многооперационный станок; 5 — приемно-передающее устройство;
6 — роликовые буферные накопители; 7 — рабочая позиция загрузки;
8 — рабочая позиция разгрузки








