 2015-04-08
2015-04-08 3117
3117Межоперационные транспортные средства предназначены для подачи заготовок со складов и автоматической транспортировки их к заданному рабочему месту, загрузки рабочих мест необходимыми заготовками, разгрузки рабочего места и транспортировки изделий на следующее рабочее место или склад, планирования оптимальных маршрутов, обслуживания рабочих мест по заданному критерию качества и транспортировки технологических отходов.
Изделия могут транспортироваться на приспособлениях-спутниках, в кассетах, в специальной таре или без них.
Большое распространение получили транспортные системы с перемещениями изделий на спутниках или для деталей малых размеров в кассетах, так как они обладают большой гибкостью и мобильностью, упрощают автоматизацию смены заготовок.
Транспортирование на спутниках применяется в основном для корпусных деталей, реже — для деталей типа тел вращения. Валы перемещаются по лоткам или на поддонах.
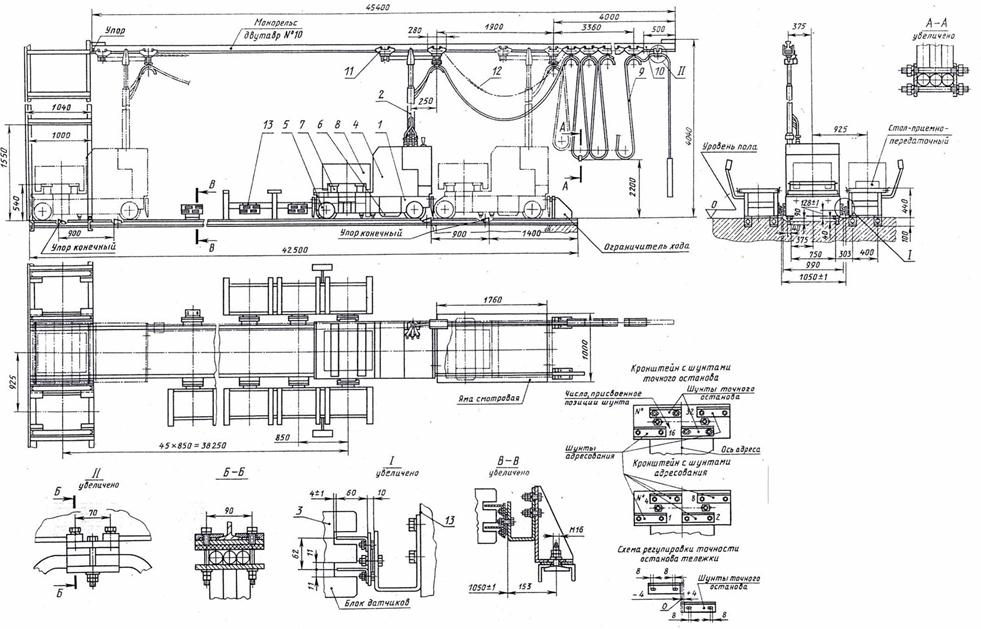 Рисунок 12.23 — Тележка транспортная рельсовая ОМ9973
Рисунок 12.23 — Тележка транспортная рельсовая ОМ9973
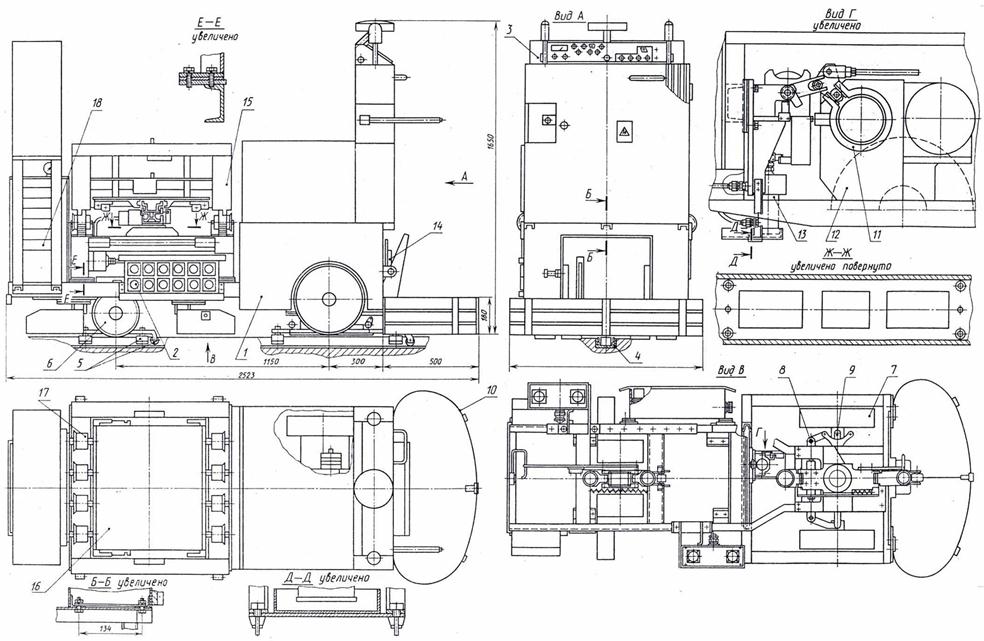 Рисунок 12.24 — Общий вид безрельсовой транспортной тележки С4234
Рисунок 12.24 — Общий вид безрельсовой транспортной тележки С4234
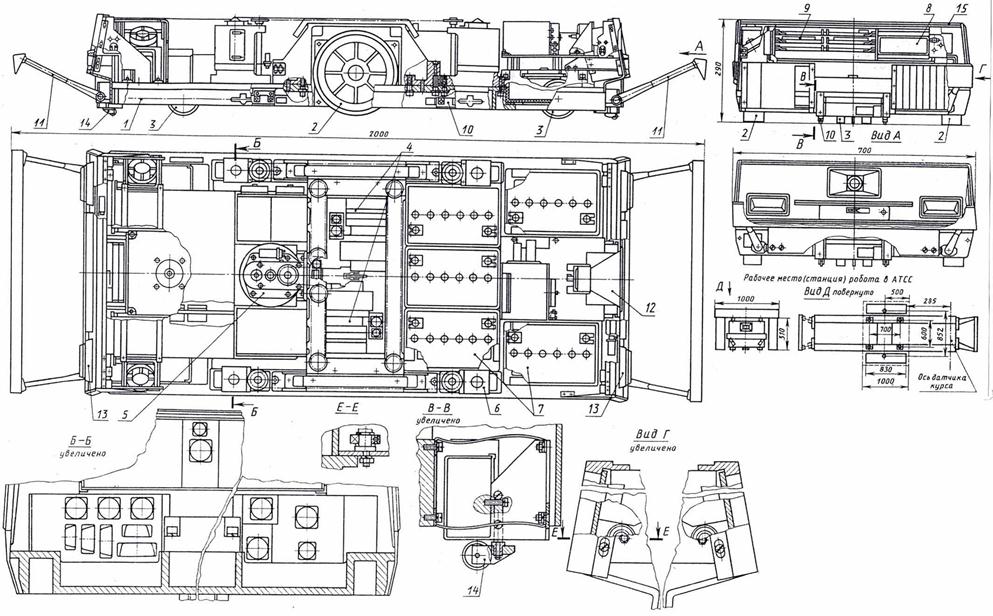 Рисунок 12.25 — Общий вид транспортного робота «Электроника НЦТМ-25»
Рисунок 12.25 — Общий вид транспортного робота «Электроника НЦТМ-25»
В качестве межоперационных автоматических транспортных устройств наиболее часто используются напольные и подвесные транспортеры линейного и замкнутого типов, рельсовые напольные и монорельсовые подвесные транспортные роботы, автоматические транспортные тележки.
Напольные транспортные системы, как правило, строятся из универсальных модульных элементов, позволяющих составлять достаточно сложные системы. Наиболее широкое распространение получили цепные или роликовые конвейеры и рельсовые тележки, которые обеспечивают накопление транспортируемых изделий путем последовательного останова управляющих приводных роликов или выключения сцепления тележек с тяговым органом.
На рисунке 12.23 показан общий вид автоматической рельсовой транспортной тележки ОМ9973, которая предназначена для передачи столов-спутников или тары с заготовками, деталями и инструментами с приемно-передающей секции склада-стеллажа на приемно-передаточные столы станков и обратно. Рельсовый путь проложен перпендикулярно оси склада-стеллажа и позволяет тележке перемещаться непосредственно в зону его приемно-выдающей секции.
На рисунке 12.24 изображен общий вид безрельсовой транспортной тележки С4234, предназначенной для транспортирования тары и столов-спутников с заготовками, деталями, инструментами и технологической оснасткой между приемно-передающими столами станков, автоматизированным складом, инструментальным и контрольно-измерительным участками ГПС для механообработки. Транспортная тележка, оснащенная автоматизированным загрузочно-разгрузочным устройством, образует автономный транспортный манипулятор. Транспортный манипулятор выполнен на базе электротележки 1 с автономными блоками питания 2 и управления 3. Направляющей 4 при движении тележки является уложенный в пол швеллер, с которым контактируют ролики 5 механизмов слежения за трассой. Задние ведомые колеса 6 поворачиваются с помощью механизма слежения так, чтобы их ось на участке поворота совпадала с центром дуги направляющей 4. Ролики механизма слежения передних приводных колес 7 посредством тяги 8 связаны с рычагами полуосей 9 колес, что обеспечивает совпадение полуосей с радиусами дуги поворота этих колес. Минимальный радиус поворота равен 2 м.
В верхней части тележки имеется буфер 10. При наезде на препятствие срабатывают датчики, дающие команду на останов. Торможение тележки осуществляется от механизма управления тормозом 11, зажимающим посредством пружины шкив, который установлен на валу редуктора 12 механизма привода. Разжим колодок тормоза производится гидроцилиндром 13 или педалью 14.
Гидроприводы тормоза 11 аппарелей 15 и механизмов телескопических платформ 16 для перемещения тары на роликах стола 17 питаются от автономной гидростанции 18, установленной в задней части тележки.
Общий вид транспортного робота «Электроника НЦТМ-25» показан на рисунке 12.25.
Данный робот оснащен автономным источником питания, микропроцессорным устройством управления, обеспечивающим слежение за трассой в виде светоотражающей полосы и загрузочно-разгрузочным столом, на котором устанавливаются тара и сменные столы спутники с заготовками, деталями, инструментами или технологической оснасткой. Транспортный робот предназначен для автоматического перемещения указанных изделий между складом-стеллажом, участками комплектования и ГПМ в составе ГПС.
В большинстве зарубежных транспортных средств, эксплуатируемых в настоящее время в производстве, применяется направляющий магнитопровод индуктивного типа. В условиях малой частоты транспортировки и высокой загрузки транспортных единиц эта система является наиболее экономичной и обладает высокой приспособляемостью к изменяющимся производственным условиям при любых объемно-планировочных решениях помещений. Единственное условие их применения — наличие ровных полов и обеспечение необходимой культуры производства (отсутствие на трассе металлических опилок, стружки).
Система транспортирования с индуктивным управлением помимо подвижного состава включает следующие элементы: генераторы высокой частоты и закольцованные контуры транспортных маршрутов; датчики для считывания и передачи информации, обеспечивающей перемещение подвижного состава по заданному адресу: центральный пульт управления и зарядную станцию для аккумуляторных батарей.
Маршрут движения задается при помощи проводника (замкнутым контуром). Проводник укладывается на полу в канавке на глубине 20…32 мм с последующей заливкой цементом или другим наполнителем. Количество маршрутов движения определяется числом проложенных по цеху замкнутых контуров. Каких-либо ограничений на геометрию укладки провода для задания маршрута нет.
В каждый контур высокочастотным генератором подается ток определенной частоты (5…32кГц). Вдоль проводника, задающего маршрут движения, создается переменное магнитное поле с концентричным расположением силовых линий. В качестве чувствительных устройств используются две электромагнитные катушки, которые устанавливаются в нижней части тележки. ЭДС, наведенная в катушках, передается в электронное устройство сравнения, которое при появлении рассогласования подает сигнал на электропривод рулевого управления. Система снабжается фильтрами выбора частоты, соответствующей своему маршруту.
Для остановки тележки в закодированных (вручную или дистанционно) пунктах и определения ее местоположения по трассе на контуре, задающем маршрут движения, устанавливаются датчики постоянной информации.
Структура программного обеспечения состоит из основных модулей — начального запуска, управляющего, обмена информацией с внешними устройствами, обработки прерывания отображения информации, стандартных и прикладных программ.
Транспорт с индуктивным управлением выполняется в следующих вариантах: тягачи с прицепными тележками, платформенные тележки, тележки с низким подъемом вил, тележки с различными грузозахватными устройствами и тележки-штабелеры.
Основные технические характеристики транспортных тележек фирмы «Wagner» (Германия) (рисунки 12.26 — 12.28) приведены в таблицах 12.5 — 12.7.
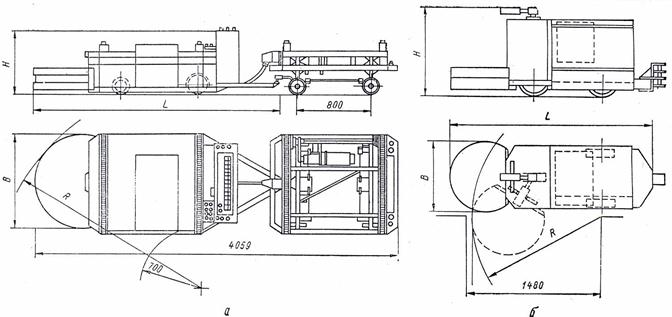
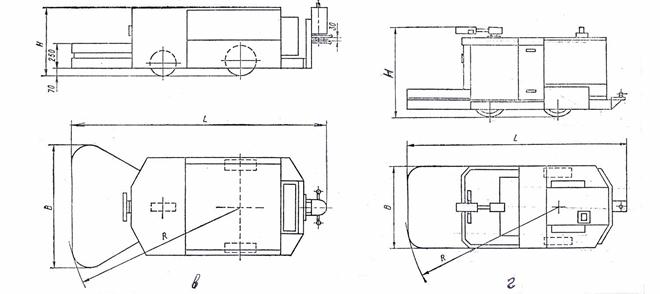
Рисунок 12.26 — Схемы тележек моделей: а — EGZ1,0-SO; б — EGZ-Z1; в — EGZ-Z1-SO;
г — EGZHy-Z1
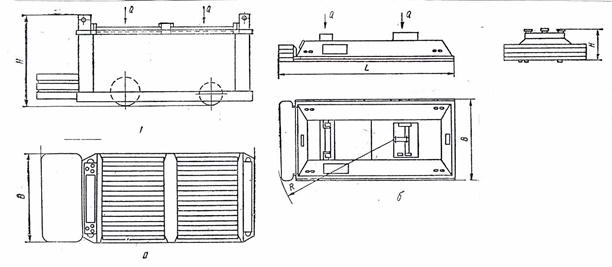
Рисунок 12.27 — Схемы платформенных транспортных тележек моделей: а - EGZ-Z1-SO;
б — EGy 600
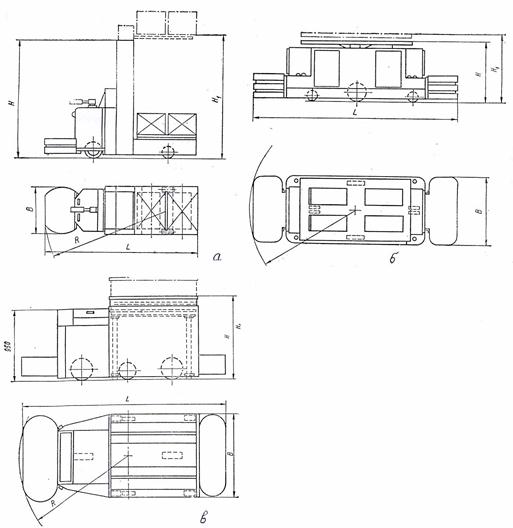
Рисунок 12.28 — Схемы транспортных тележек-штабелеров моделей: а — EGHQ-Z1-R;
б —EGN-Z1-R-SO; в - EG-Z1-R-SO
Таблица 12.5 — Технические характеристики тележек-тягачей с прицепными тележками
(рисунок 12.26)
| Параметры | EGZ1,0-SO | EGZ-Z1 | EGZ-Z1-SO | EGZHy-Z1 |
| Грузоподъемность, кг | ||||
| Габаритные размеры, мм: L B H | ||||
| Радиус поворота R, мм | ||||
| Скорость движения, м/с: с грузом без груза | 1,2 | 0,75 1,2 | 0,9 1,1 | 0,9 1,0 |
| Масса, кг | ||||
| Ширина колеи, мм | ||||
| Мощность привода, кВт | 1,0 | 1,0 | 2,,2 | 2,2 |
Таблица 12.6 — Технические характеристики платформенных транспортных тележек
(рисунок 12.27)
| Параметры | EG-Z1-SO | EGy 600 |
| Грузоподъемность, кг | 2´100 | |
| Габаритные размеры, мм: L B H | ||
| Радиус поворота R, мм | ||
| Скорость движения, м/с | 1,1 | 0,8 |
| Масса, кг | ||
| Ширина колеи, мм | — | |
| Мощность привода, кВт | 0,6 | 2´0,3 |
Таблица 12.7 — Технические характеристики транспортных тележек-штабелеров (рисунок 12.28)
| Параметры | EGHQ-Z1-R | EGN-Z1-R-SO | EG-Z1-R-SO |
| Грузоподъемность, кг | 2´250 | ||
| Габаритные размеры, мм: L B H | |||
| Высота подъема груза Н1, мм | |||
| Радиус поворота R, мм | |||
| Скорость движения, м/с: с грузом без груза | — 1,0 | 0,7 0,8 | 0,4 0,8 |
| Масса, кг | — | ||
| Ширина колеи, мм | |||
| Мощность привода, кВт | 4,0 | 5´0,2 | 0,7 |

