 2015-04-01
2015-04-01 687
687Если в твердом теле существуют упругие волны, то отдельные частицы, из которых состоит это тело, испытывают колебательное движение. В теории упругости вещество рассматривается как непрерывная, сплошная среда (континуум). В таком случае колебательному движению будет подвержен любой выделенный в среде элементарный объем и к нему можно применить 2-й закон Ньютона. Чтобы это сделать, рассмотрим в окрестности точки с радиусом-вектором r (см. рис.1) элементарный объем среды в виде 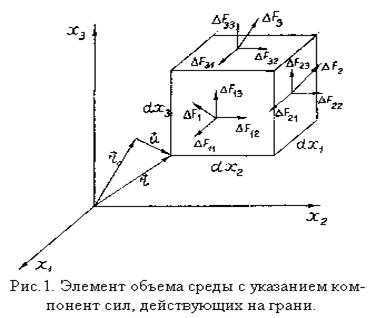
прямоугольного параллелепипеда, ребра которого параллельны осям прямоугольной системы координат x1, x2, x3 и имеют длины dx1,dx2,dx3. Со стороны окружающей среды на вещество, заключенное в объеме
dV=dx1 dx2 dx3, действуют силы, обеспечивающие его ускорение. Пусть ∆ F i - сила, действующая на одну из обращенных к нам граней обьема dV, перпендикулярную i-ой оси. На противоположную грань будет действовать сила-(∆ F i- d (∆ F i)), где d(∆ F i) - приращение, обусловленное расстоянием dxi. Суммарная сила, действующая на весь объем, может быть записана как векторная сумма

Тогда 2-й закон Ньютона, описывающий движение элементарной массы, заключенной в объеме dV, примет в векторной форме вид

где ρ - плотность среды, которую для волн малых амплитуд можно считать постоянной величиной.
Радиус-вектор r, имеющий компоненты x1, x2, x3, отсчитывается от некоторого фиксированного начала координат и является функцией времени и начального радиуса-вектора r 0 (см. рис.1) с компонентами x10, x20, x30. Смещение элементарного объема dV из начального положения характеризуется вектором u. Легко видеть, что

Если за начальное положение точек среды принять их невозмущенное состояние, то u будет вектором смещения из положения равновесия. Поскольку для рассматриваемого объема r 0 = const, то d2 r/ dt2=d2 u /dt2. На этом основании (1) примет вид

При заданных d(∆ F i) это уравнение имеет решение u (t), описывающее движение некоторой материальной точки с начальными координатами x10, x20, x30. Чтобы найти закон движения другой точки, необходимо в (2) сменить координаты xi0 и соответствующие приращения сил d(∆ F i). Если проделать такую замену многократно, то из уравнения (2) может быть получено дискретное распределение вектора смещения u в пространстве.
Наша задача заключается в нахождении волн, которые могут существовать в данной упругой среде. Волна описывается непрерывной функцией от времени и координат, характеризующей точки пространства, не связанные с конкретной материальной частицей среды. Такое описание называется пространственным. Чтобы решить поставленную задачу, необходимо уравнение (2) видоизменить так, чтобы оно давало пространственное описание поля смещений. Такое видоизменение обычно называют переходом от материального описания (переменные Лагранжа) к пространственному (переменные Эйлера).
Смещение u в данный момент времени для различных частиц среды будет различным, т.е. u есть функция радиуса-вектора r, характеризующего начальное положение точек среды. Начальные координаты этих точек, по сути дела, совпадают с координатами точек пространства. Поэтому величину u можно представить в пространственном описании как функцию времени и пространственных координат. В таком случае для компонент скорости в пространственном описании поля смещений будем иметь

Компоненты скорости v i в пространственном описании также представляют собой некоторую функцию v i(t, x1, x2, x3). Тогда компоненты ускорения d v i /dt, входящего в уравнение (2), можно записать следующим образом

где круглые скобки означают скалярное произведение. Если считать, что дрейфовое движение частиц среды отсутствует, то в случае волн малой амплитуды можно принять (v grad vi) = 0. На этом основании, переходя в (2) к пространственному описанию поля смещений, полную производную d v /dt следует приближенно заменить частной производной ∂ v /dt. Учитывая также выражение (3), получим из (2)

Обратимся теперь к правой части полученного уравнения. На рис.1 показаны компоненты сил ∆ Fi, действующих на грани, перпендикулярные осям xi. Например, для грани, перпендикулярной оси xi, будем иметь следующие компоненты: ∆ Fi 1, ∆Fi 2,∆Fi 3. Первый индекс указывает номер оси, перпендикулярной грани, а второй - оси, параллельно которой направлена соответствующая компонента. В общем случае будем иметь ∆ Fij. Воспользуемся понятием тензора упругого напряжения, компоненты которого определяются формулой
где ∆ Si - элементарная площадка, перпендикулярная i-й оси. По смыслу величина Ti j является компонентой упругой силы, приходящейся на единицу площади соответствующей грани. Упругое напряжение как физическая величина представляется тензором второго ранга и в общем случае характеризуется 9-ю компонентами, величины которых зависят от выбора системы координат.
Учитывая, что d(∆Fij)=dTij dSi из (4) для j-й компоненты смещения получим в пространственном описании уравнение движения в окончательном виде:

Для сокращения записи знак суммы в правой части полученного уравнения опущен, а свидетельством суммирования служит повторяющийся индекс i.
2.2. Уравнения состояния пьезоэлектрика.
Имеется два феноменологических уравнения, описывающих в линейном приближении электромеханическое состояние пьезоэлектрической среды. Первое уравнение связывает компоненты тензора упругого напряжения T i j с компонентами тензора деформации S k l и компонентами вектора напряженности электрического поля E m.

В нем CEi j k l и em i j - коэффициенты пропорциональности, являющиеся материальными константами. CEi j k l - компонента тензора четвертого ранга, называемого тензором модулей упругости (жесткости); верхний индекс E означает, что эта величина получена при E = const; em i j - компонента тензора третьего ранга, называемого тензором пьезомодулей; Sk l - безразмерная деформация, связанная с компонентами вектора смещения u, формулой

Первое слагаемое в правой части уравнения (6) выражает известный закон Гука для упругой среды. Второе слагаемое описывает пьезоэффект, заключающийся в том, что электрическое поле порождает в пьезоэлектрике упругое напряжение. Заметим, что для кристалла и первое, и второе слагаемые в формуле (6) представляют собой суммы по повторяющимся индексам k, l и m, каждый из которых может принимать значения 1, 2, 3.
Второе уравнение состояния пьезоэлектрика связывает компоненты вектора электрического смещения (индукции) D с компонентами тензора деформации S и вектора напряженности электрического поля E


Коэффициентами пропорциональности здесь служат компоненты пьезоэлектрического тензора (пьезомодули) en k l и компоненты тензора диэлектрической проницаемости εSn m, найденные при S =const. В правой части уравнения (8) второе слагаемое связывает электрическую индукцию с напряженностью электрического поля как в диэлектрике. Первое слагаемое отражает опытный факт поляризации пьезоэлектрика под действием деформации даже в отсутствие внешнего электрического поля.








