 2015-04-30
2015-04-30 3431
3431У исполнительных двигателей с якорным управлением обмоткой возбуждения является обмотка полюсов, а обмоткой управления — обмотка якоря (см. рис. 1.2, а). На все время работы автоматического устройства обмотку возбуждения подключают сети с постоянным напряжением UB. На обмотку управления подают сигнал Uy — напряжение управления — лишь тогда, когда необходимо вращение якоря двигателя. От величины напряжения управления зависит величина вращающего момента и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
Так как при работе двигателя напряжение возбуждения UB постоянно, то ток в обмотке возбуждения Iв, а следовательно, и магнитный поток Фв также постоянны (Фв ≡ Iв ≡UB):
 (1.1)
(1.1)
При вращении якоря в обмотке якоря (управления) наводится противо-ЭДС Еу, величина которой пропорциональна потоку Фв и частоте вращения п:
Еу=сеФвп=сесфUвп.
Ток якоря (обмотки управления) определяется согласно выражению:
 , (1.2)
, (1.2)
где rу —сопротивление обмотки якоря (управления).
Вращающий момент двигателя развивается за счет взаимодействия потока возбуждения Фв с током якоря Iу:
 (1.3)
(1.3)
После подстановки Iу из выражения (1.2) получим
 (1.4)
(1.4)
Для того чтобы характеристикам двигателей придать универсальный характер, независимый от мощности двигателя и его конструктивных особенностей, при анализе исполнительных двигателей здесь и в дальнейшем будем пользоваться системой относительных единиц, т. е. выражать действительные величины (момент, мощность, частоту вращения, напряжение управления и т. п.) через отношения их к некоторым постоянным величинам, принятым за единичные.
За напряжение управления Uy в относительных единицах α примем его отношение к постоянному по величине напряжению возбуждения:
 (1.5)
(1.5)
Назовем α коэффициентом сигнала.
Заменив в выражении момента (1.4) Uy через UBα, получим
 (1.6)
(1.6)
За единицу момента в относительных единицах примем момент Мпуск1, развиваемый двигателем при пуске (n =0), когда коэффициент сигнала α =1, т. e. Uy=UB.
Согласно (1.6) величина этого момента
 (1.7)
(1.7)
Единичный момент М пуск1 для любого двигателя является вполне определенной постоянной величиной.
Выражение момента двигателя в относительных единицах найдем как отношение действительного момента М к единичному Мпуск1:
 (1.8)
(1.8)
За единицу частоты вращения в относительных единицах примем частоту вращения при идеальном холостом ходе n01 (при m= 0) в случае равенства напряжений управления и возбуждения (Uу=Uв).
Выражение единичной частоты вращения найдем из уравнения (1.8) путем подстановки в него m =0 и α =1:
 (1.9)
(1.9)
Частота вращения n01 — постоянная, вполне определенная для любого двигателя величина.
Заменим в выражении момента (1.8) сесф на  :
:
 , (1.10)
, (1.10)
Преобразуя полученное уравнение и учитывая, что отношении действительной частоты вращения n к единичной n01 есть частота вращения в относительных единицах ν, получим уравнение механической характеристики двигателя:
m=α-ν. (1.11)
Это уравнение показывает, что вращающий момент m исполнительного двигателя с якорным управлением является линейной функцией частоты вращения ν и коэффициента сигнала α.
На рис. 1.3 представлено семейство механических характеристик двигателя m = f(v) при α =const, построенных в относительных единицах на основании уравнения (1.11), где α =0,25; 0,50; 0,75; 1,0.
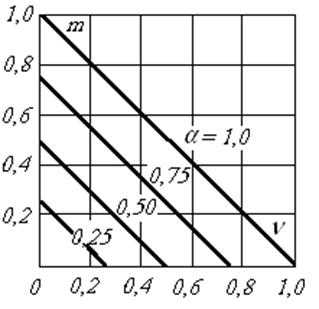
Рис. 1.3 Механические характеристики при якорном управлении
Из уравнения (1.11) и рис. 1.3 следует, что при заданном постоянном коэффициенте сигнала (напряжении управления) частота вращения двигателя уменьшается с увеличением момента на валу по линейному закону.
Максимальный момент двигателя имеет место при пуске (при v =0). Величина максимального (пускового) момента в относительных единицах равна коэффициенту сигнала (при v = 0; m=α), т. е. пусковой момент пропорционален напряжению управления: Мпуск1≡Uy. Последнее означает, что напряжение трогания Uтр (напряжение, при котором якорь двигателя при заданном моменте сопротивления на валу начинает вращаться) прямо пропорционально моменту сопротивления. При уменьшении напряжения управления (коэффициента сигнала) механические xapaктеристики двигателя смещаются (параллельно) в сторону меньших частот и моментов. Жесткость (наклон) механических характеристик при этом не изменяется.
Частота вращения при холостом ходе двигателя v0 (при m =0) в относительных единицах, как это следует из уравнения (1.11), равна коэффициенту сигнала α, т. е. пропорциональна напряжению управления (n0 = Uy).
Если выражение (1.11) переписать в виде
ν = α - m, (1.12)
то оно будет являтьсяуравнением регулировочной характеристики двигателя с якорным управлением: ν=f(α) при m =const.
На рис. 1.4 изображено семейство регулировочных характеристик, построенных в относительных единицах для m = 0; 0,25; 0,50; 0,75.
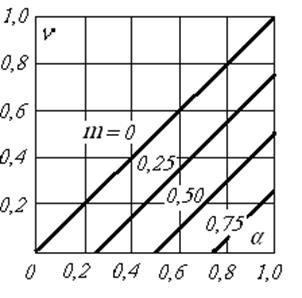
Рис. 1.4. Регулировочные характеристики при якорном управлении
Из этих характеристик, а также из выражения (1.12) следует, что при любом заданном моменте сопротивления на валу частота вращения двигателя v возрастает с увеличением напряжения управления Uy (коэффициента сигнала α) по линейному закону. Иными словами, частота вращения пропорциональна напряжению управления: n ≡Uу.
Максимальная частота вращения, которую развивает двигатель при определенном моменте сопротивления на валу, имеет место при номинальном напряжении управления (при α =1). Эта частота обратно пропорциональна моменту сопротивления m.
Весьма ценным свойством исполнительных двигателей постоянного тока с якорным управлением является линейность их механических и регулировочных характеристик. Этим свойством не обладает ни один другой исполнительный двигатель.
Мощность возбуждения исполнительного двигателя с якорным управлением равна электрическим потерям в активном сопротивлении rв обмотки возбуждения:
 (1.13)
(1.13)
Эта мощность при постоянном напряжении возбуждения Uв (что имеет место в реальных двигателях) постоянна — она не зависит от нагрузки. Ее величина, как и величина потерь в обмотках возбуждения любого двигателя постоянного тока, незначительна, поскольку основная часть потребляемой двигателем мощности идет через якорь.
Мощность возбуждения, выраженная в процентном отношении к полной мощности, потребляемой двигателем, растет с уменьшением номинальной мощности двигателя: от 5% (в двигателях с номинальной механической мощностью 250 Вт) до 30% (в двигателях с мощностью 5÷7 Вт).
Мощность управления двигателя постоянного тока c  якорным управлением равна произведению напряжения Uу на ток Iу (ток якоря):
якорным управлением равна произведению напряжения Uу на ток Iу (ток якоря):
Py = UyIу (1.14)
Эта мощность равна сумме полной механической мощности развиваемой двигателем (включая потери на трение в подшипниках, о воздух), и потерь в якоре (электрические — в обмотке магнитные — в стали). Это, по существу, вся мощность, потребляемая двигателем, за исключением потерь в обмотке возбуждения Рв. Мощность управления достаточно велика, что является большим недостатком двигателей постоянного тока с якорным управлением, так как в случае питания обмотки управления от усилителя приходится значительно увеличивать габариты его, следовательно, и автоматического устройства в целом.
При постоянном моменте на валу, что чаще всего бывает на практике, вследствие постоянства потока Фв ток управления [см. (1.3)] постоянен и мощность управления [см. (1.14)] пропорциональна напряжению управления Uy (коэффициенту сигнала α).
Механическая мощность на валу двигателя (Р2=Мω или в относительных единицах p2=mv) при заданном напряжении управления (коэффициенте сигнала α) является нелинейной функцией частоты вращения:
р2=mv=(α—v)v=αv—v2. (1.15)
При пуске (v =0) и холостом ходе (m =0) она равна нулю и достигает максимума при частоте вращения, равной половине частоты вращения холостого хода v0 =α, т. е. при vp2max =  , в чем можно убедиться, продифференцировав зависимость (1.15) по v и приравняв производную нулю.
, в чем можно убедиться, продифференцировав зависимость (1.15) по v и приравняв производную нулю.
Максимум механической мощности р2max может быть найден путем подстановки vp2max в выражение (1.15):
р2mах =  , (1.16)
, (1.16)
т. е. максимальная механическая мощность двигателя пропорциональна квадрату коэффициента сигнала (напряжения управления). При номинальном напряжении управления (α =1) р2mах составляет  от мощности, потребляемой якорем двигателя при пуске, когда n =0 и Uy=Uв (эта мощность принимается за единичную).
от мощности, потребляемой якорем двигателя при пуске, когда n =0 и Uy=Uв (эта мощность принимается за единичную).
На рис. 1.5 представлено семейство кривых p2 = f(ν) при α =const, где α =0,25; 0,50; 0,75; 1,0.
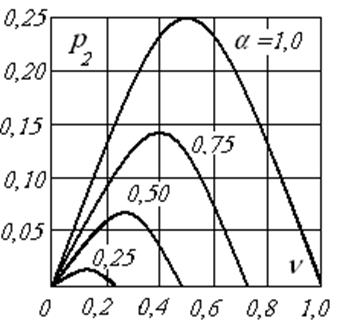
Рис. 1.5 Зависимость механической мощности от частоты вращения при якорном управлении
К исполнительным двигателям постоянного тока с якорным управлением, кроме двигателей с обмоткой возбуждения на полюсах, относятся также двигатели с постоянными магнитами. У этих двигателей обмотка возбуждения отсутствует, основной магнитный поток создается постоянными магнитами.
По своим рабочим и регулировочным свойствам двигатели постоянными магнитами практически не отличаются от двигателей с якорным управлением: они имеют такие же механические и регулировочные характеристики, такие же зависимости p2 = f(ν).
Преимущество двигателей с постоянными магнитами — у них нет обмотки возбуждения, они имеют более высокий КПД из-за отсутствия потерь на возбуждение, их магнитный поток практически не зависит от изменений температуры окружающей среды (чего нельзя сказать об обычных двигателях).
Недостатки двигателей с постоянными магнитами — старение магнитов, которое особенно интенсивно происходит в условиях тряски и вибраций, что приводит к уменьшению магнитного потока и к изменению свойств двигателей; стоимость двигателей с постоянными магнитами, несмотря на кажущуюся -их простоту, не меньше, а иногда даже больше стоимости двигателей с обмоткой возбуждения. Причинами этого являются высокая стоимость и сложность обработки магнитотвердых материалов, идущих для изготовления постоянных магнитов. Именно поэтому до недавнего времени с постоянными магнитами выпускались лишь микродвигатели мощностью до 10÷15 Вт. Наибольшее распространение получили микродвигатели серии ДПМ.
В' последние годы появились и получили довольно широкое промышленное распространение дешевые легко обрабатываемые ферритно-бариевые магниты. Они позволили создать сравнительно недорогие исполнительные двигатели постоянного тока больших мощностей — 10 кВт и более. Это так называемые высокомоментные двигатели, применение которых дает значительный экономический и технический эффект, особенно в станкостроительной промышленности.








