 2015-04-20
2015-04-20 932
932Предусмотрены сочетания нагружений 'load' [1..5]. В каждое сочетание могут входить mp нагрузок [1..10]. Нагрузками могут быть: сосредоточенная сила F, распределенная нагрузка q, узловое вертикальное перемещение U. Различаются узловые и элементные нагружения. Если сосредоточенная сила приложена в узле балки или достаточно близко, то ее следует задавать как узловую, т. е. привязка не координатная, а по номеру узла.
Правило знаков: '+' продольная нагрузка растягивает; '+' погонная нагрузка, '+' сосредоточенная сила и '+' прогиб направлены вниз.
2. Пилоны. Их положение задается координатой точки “0” яруса. Число пилонов в системе [0..2]. Порядок нумерации пилонов – произвольный, но удобнее слева направо. Пилон должен проецироваться на любой узел балки и не может быть вне ее узла.
Пилон имеет i_pil уровней (ярусов) крепления канатных элементов [1..5]. Нумерация их начинается от уровня "1" в сторону конца пилона. Узел в заделке не включается в общую систему узлов. В местах изменения профиля (поперечного сечения) пилона вводятся дополнительные расчетные сечения (фиктивные).
Для каждого участка (яруса) пилона задается его высота (уровень) Y, изгибная жесткость EI, погонный вес p_pil и код подвижности ОЧ kz_pil (рис. 7.9); информационные точки не задаются.
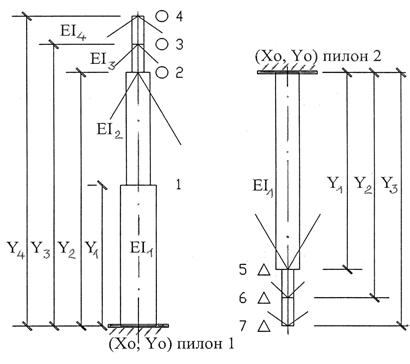
Рис. 7.9. Схемы ярусов пилонов. Расчетные схемы пилона
Пилон может одновременно работать на восприятие кабелей и вант. По статической схеме различаются:
а) защемленная снизу сжатая стойка ("+" высота);
б) защемленная сверху растянутая подвеска ("–" высота).
Для опирания кабелей и сдвоенных вант наличие пилона обязательно. Не допускаются пилоны с «0» высотой; вместо этого применяют крепление к АМ, расположенным в требуемых уровнях.
Дополнительные опции: «отключение» продольного усилия при изгибе пилона; учет его симметрии.
Особенности «0» состояния
Различают следующие типы восприятия узлом пилона горизонтальной нагрузки от кабеля / ванты:
код kz_pil = 0, ПП опирание; не воспринимает никаких горизонтальных нагрузок;
код kz_pil = 1, ПН опирание; воспринимает только временную; пилон «компенсирован», что достигается устройством монтажных тяг и связей;
код kz_pil = 2, ПН опирание; воспринимает монтажную и временную нагрузки; участок изгибается в «0» состоянии, т. е. пилон «не компенсирован».
3. Анкерные массивы предназначены для восприятия усилий, передаваемых от прямолинейных оттяжек и криволинейных ветвей кабеля.
Активные сдвоенные ванты к ним не крепятся.
АМ могут располагаться в любом месте и определяются положением координаты расчетного узла (X, Y).
Крайние в кабельной цепи АМ имитируют устройство абсолютно жестких пилонов с «0» высотой и ПН опиранием.
4. Кабель. Общее число всех кабелей k_sys в модели может достигать 3. Предусмотрена возможность последовательного включения / отключения кабелей в расчетной схеме без удаления записей в ИД.
Общими для всех ветвей кабеля являются: стержневая жесткость EA, погонный собственный вес g_cab и начальный распор h_cab (рис. 7.10). Все остальные параметры и нагружения могут отличаться для каждой ветви.
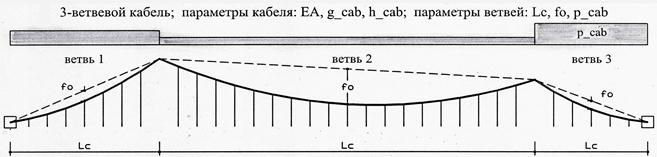
Рис. 7.10. Схема многоветвевого кабеля
Начало и конец кабеля допускается крепить к следующим элементам:
- узлу анкерного массива (распор воспринимается «землей» (рис. 7.13, а);
- ПН опорной части пилона (воспринимается сечением изгибаемого пилона, (рис. 7.13, в));
- ПН опорному узлу балки (распор передается на основание (рис. 7.13, б));
- внеопорному узлу балки (воспринимается сечением балки (рис. 7.15, в)).
Промежуточные узлы кабеля имеют ПП крепление и структурно разделяют кабель на ветви. Если у кабеля ПН опирание, то он разбивается на отдельные ветви, имеющие различные значения распора (рис. 7.15, б).
В общем случае кабель может состоять из нескольких прямолинейных / криволинейных ветвей. Чаще это 1–2–3 ветви. Ветвь длиной Lc соединяется через подвески с балкой и имеет начальный провис fo. Прямолинейные оттяжки могут быть только боковыми (рис. 7.13, а). Исключение составляет кабель из одной ветви: он может быть без оттяжек (рис. 7.13, б, в).
Правило знаков: '+' стрелка кабеля fo провисает вниз; '+' распор кабеля h_cab растягивает.
Криволинейная ветвь может иметь краевые участки a, c без подвесок, которые по конструктивным особенностям ВС крепятся только в средней части ветви b (d = a + b + c). Поэтому для ненулевых значений a, c указывают номера подвешенных участков балки: e1 – начало, e2 – конец
(рис. 7.13, в, 7.15, д). Кроме того, делается обязательное перераспределение веса неподкрепленных участков балки:
- на участках, соответствующих a, c p_bal = 0;
- на среднем участке добавляется нагружение p_ac = p_bal (a + c) / 2 b.
Иначе балка будет изгибаться в «0» состоянии, что можно проверить, сделав нагружение q (x) = 0.
Нумерация кабелей не зависит от их пространственного положения. Нумерация ветвей в кабеле: слева направо. Число всех ветвей в кабеле ограничено l_cab [1..3].
Прямолинейная (пассивная) оттяжка имеет формальный признак нулевого провиса fo = 0. Под прямолинейной оттяжкой может не быть участка балки (рис. 7.13, а); она может только ПП крепиться к пилону.
Криволинейная (активная) оттяжка (fo ≠0) должна проецироваться на связанный с ней через подвески участок (элемент) и не может работать отдельно без балки.
Оттяжка – это ванта, работающая только на растяжение:
- передает распор от ВС на АМ или на балку в опорном сечении;
- ограничивает горизонтальное перемещение ПП опорных частей на пилоне.
Также можно моделировать гибкую арку в виде пологой сжатой стержневой цепи параболического очертания.
ВС включает несколько расчетных схем i_syst [1..5], соответствующих различным этапам монтажа. Решение находится для кабеля с присвоенным кодом ki_cab [1..5] по условию: если ki_cab <= i_syst, то кабель «работает» на этапе; иначе он «выключен».
Так оперативно контролируется порядок включения / выключения кабелей в работу на монтаже.
Типы продольного профиля кабеля: параболический, цепной или произвольной формы, описываемый из внешней программы данных. Наиболее удобно параболическое очертание: km_cab = 0 (по умолчанию).
Криволинейный кабель (fo ≠ 0) из одной ветви (без оттяжек) можно подвесить:
- между узлов пилонов с ПН ОЧ или между АМ (рис. 7.13, в). При этом пилоны должны иметь достаточную изгибную жесткость;
- между узлами балки (безраспорная система, рис. 7.13, б). Таких подкрепленных подвесками / стойками участков на балке может быть несколько.
Особенности устройства многокабельных ВС:
· к одной ветви могут быть подвешены несколько участков одной балки, а к одному кабелю – несколько балок;
· один участок балки может быть подвешен одновременно к нескольким кабелям; при этом его вес p_bal разделен между ними пропорционально доле b_cab, зависящей от степени отпорности каждого кабеля.
Допускается опирать кабель только на АМ: их удобно применять, так как не требуется описание пилонов. При этом нельзя делать смешанное опирание с применением пилонов. Крайние в цепи АМ всегда имеют ПН крепление, а промежуточные – ПП.
Если для 2-ветвевого кабеля требуется заменить продольно-подвижное опирание среднего узла на неподвижное, то кабель разрезается на 2 ветви с ПН креплением (рис. 7.14, а, б). Аналогично для 3-ветвевых кабелей (рис. 7.15, а, б).
Регулировка усилий в кабелях. Кабель обязан иметь ненулевое предварительное натяжение, которое можно альтернативно задать:
а) формальной величиной распора h_cab, действующего на кабель целиком. При этом не учитываются вес кабеля g_cab и p_cab, удобно применять для решения тестовых задач;
б) погонными нагрузками g_cab и p_cab, действующими на кабель и отдельные ветви соответственно.
«0» состояние многопролетных кабелей
Исходными нагружениями для каждой ветви являются:
- g_cab – погонный вес кабеля, неизменяемая величина;
- p_cab – погонное усилие натяжения за счет изменения длины подвесок;
- p_dec = p_bal * b_cab – воспринимаемая часть веса балки (для многокабельных ВС), где b_cab = 0..1 – доля веса балки, выбираемая исходя из отпорности кабеля и схемы его монтажа (для однокабельных b_cab = 1; для многокабельных их сумма для всех участков балки не должна превышать 1,0).
В общем случае указанные нагружения приводят к различным величинам распора Hp у каждой ветви, что недопустимо. Равенство распоров во всех ветвях является условием правильной работы ВС. При этом отсутствует горизонтальное перемещение промежуточных узлов, а кабель занимает проектное положение.
Для выполнения этого условия программа принудительно назначает новые величины p_tree вместо старых p_cab для всех ветвей. «Эталонная» ветвь, имеющая максимальный пролет, остается без изменений. Таким образом, кабель добавочно нагружается величиной p_add = p_tree – p_cab за счет изменения длины подвесок в пределах всех ветвей, кроме «эталонной».
Понятие «компенсированности» кабеля
Кабель «компенсирован», если в «0» состоянии при соблюдении его проектных параметров (L0, fo) и нагрузок (g_cab, p_cab) в подвешенной балке не возникают прогибы и изгибающие моменты. Однако иногда кабель может быть не «компенсирован» на усилие натяжения p_tree. Программа позволяет это моделировать:
- код kd_cab = 0 (по умолчанию). Усилие натяжения p_tree в «0» состоянии не учитывается, так как натяжение подвесок «компенсировано»; достигается устройством временных подмостей и / или уравновешенного навесного монтажа балочной части;
- код kd_cab = 1; подвешенная балка изгибается от невоспринятого нагружения p_tree, т. е. подвески этой ветви не «компенсированы».
«0» состояние безраспорных ВС
Для таких систем характерна передача через наклонные оттяжки распора Hp и вертикальной реакции Rp на балку (рис. 7. 15, д). Для безраспорных систем с внеопорным закреплением кабеля программа различает следующие состояния:
- код kr_cab = 0 (по умолчанию). Опорная реакция Rp в “0” состоянии не учитывается, так как реакция «компенсирована»; достигается устройством временных опор, тяг и подкосов, убираемых после монтажа. При этом Hp передается балке в полном объеме, так как «перехват» распора конструктивно очень сложен;
- код kr_cab = 1; балка изгибается от неподкрепленной оттяжки, т. е. реакция не «компенсирована».
Учет статического баланса веса подвешиваемых балок (нет связи с кодами kr_cab и kd_cab):
- код kb_cab = 0 (по умолчанию) – баланс не выполняется;
- код kb_cab = 1 – баланс выполняется в виде дополнительных нагрузок на балку для следующих случаев:
а) при наличии «остатка» веса балки, не учтенного поддерживающими ее кабелями: p_rest = p_bal * [1. - ∑(b_cab)]; актуально только для многокабельных систем;
б) при наличии корректирующего нагружения p_mod = p_dec – p_mid, необходимого для соблюдения баланса; актуально только для нескольких участков балки, поддерживаемых одной ветвью,
где p_mid = [∑(p_dec * d)] / [sum (d)] – усредненное значение по ветви;
p_mod = 0, если на участке ветви p_dec = const.
Натяжение 2-ярусного висячего моста. Система состоит из верхнего и нижнего кабелей, связанных между собой растянутыми подвесками. Нижний (обратный) кабель всегда имеет более пологий профиль, чем верхний (прямой): fн ~ (0,3…0,5) fв.
Размеры всех подвесок и очертание обоих кабелей подобраны так, что после предварительного напряжения они получают параболическое очертание, а усилия в подвесках будут одинаковыми.
Примем условие, что верхний кабель помимо собственного веса gв воспринимает вес нижнего кабеля gн и полный вес балки p_bal. Этапность монтажа поясов:
· на 1-м этапе монтируется верхний кабель с подвешенной к нему балкой, что учтено долей b_cab = 1. Кабель принимает начальное положение fвo, показанное пунктиром на рис. 7.11;
· на 2-м этапе к верхнему кабелю подвешивается нижний, свободный от веса балки (b_cab = 0); его начальное положение задано fнo;
· на 3-м этапе выполняется натяжение обоих кабелей регулировкой длин подвесок с помощью монтажных муфт. Возникает уравновешенная система сил натяжения t, которая приводит к взаимному сближению кабелей в проектное положение fв1 и fн1. Балка жесткости при этом свободна от изгибающих усилий.
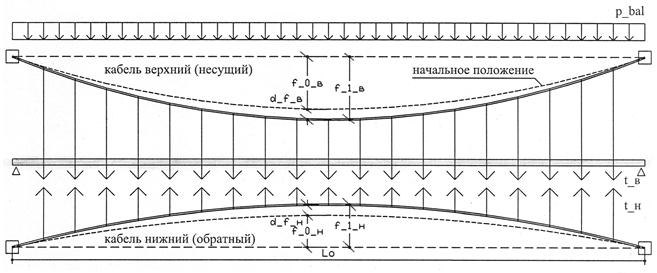
Рис. 7.11. Расчетная схема двухъярусного висячего моста
При дальнейшем нагружении расчетной временной нагрузкой q (x) нижний кабель не должен потерять своего натяжения (Htн – Hqн) > 0. Из этого условия находится усилие t и монтажные перемещения:
Dfв – провис верхнего кабеля от натяжения t и веса нижнего кабеля gн, где fв1 = fвo + Dfв; Dfн – выгиб нижнего кабеля от натяжения t; fн1 = fнo + Dfн.
Конструктивная нелинейность кабеля / арки
«Интэл» контролирует нагружение кабелей / арок для заданного критерия и выдает сообщение о недопустимости суммарного распора: H = Hp + Hq.
Корректировка Hq по итерациям с учетом конструктивной нелинейности не выполняется, так как процесс расходится. В исходных данных применяются критерии контроля и ключевые слова:
· ‘ cab ’ – кабель может быть только растянутым, поскольку является гибким канатным элементом; кабель не должен опадать при fo < 0 (перевернутая цепь);
· ‘ arc ’ – арка может быть только сжата, так как работает на сжатие (чугун, физическая нелинейность) или является гибкой аркой, теряющей при H < 0 свой профиль; обратная арка (fo > 0) не должна растягиваться;
· ‘ rod ’ – элемент может быть как сжатым, так и растянутым; это универсальный стержень.
5. Ванты. Программа реально учитывает ограниченное число сдвоенных вант (6–8 пар на всю систему); максимально n_van [0..10]. Применение большего количества канатных элементов приводит к численной неустойчивости, и система должна решаться с использованием вантовых сетей. Сдвоенные ванты позволяют моделировать такие системы как «арфа», «веер» и «пучок» (рис. 7.16).
Для каждой пары вант задается их стержневая жесткость EA, объемный вес материала g_van и начальное натяжение Sp (рис. 7.12).



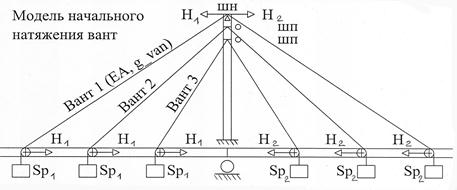
Рис. 7.12. Расчетная схема сдвоенных вант
Нумерация сдвоенных вант: от наружного яруса пилона к внутреннему (от консоли к заделке). Сдвоенные ванты не могут соединяться с другими пилонами.
Код ki_van – номер включения ванты в расчетную схему [1..5], управляет его участием в этапе монтажа: если ki_van <= i_syst, то ванта «работает» на этапе; иначе ванта «выключена».
Тип формы провиса ванты от собственного веса:
- код km_van = 0 – прямая (по умолчанию); не требует задания E, gvan и G;
- код km_van = 1 – парабола с провисом fo; требует дополнительного ввода данных:
· g_van – объемный вес материала ванты, тс/м3;
· E – модуль продольной упругости прямолинейной ванты, тс/м2
(с масштабным коэффициентом);
· G – напряжение в ветвях ванты от постоянного и временного нагружений (Sp + p + q); (тс/м2, без масштабного коэффициента).
Учет действия вертикальной реакции ванты на балку в «0» состоянии:
- код kr_van = 0, не воспринимается (по умолчанию), т. е. реакция «компенсирована» подмостями;
- код kr_van = 1, воспринимается, т. е. реакция не «компенсирована» и балка изгибается.
Учет типа крепления ванта на пилоне:
- {код kz_van = 0 – ПП; = 1 – ПН} – без поворота;
- {код kz_van = 2 – ПП; = 3 – ПН} – с поворотом опорной части.
Численная сходимость не наступает, если независимых вант / кабелей (неизвестных) в системе более 12–16. Чем точнее подобраны по приближенным зависимостям осевые жесткости EA вант / кабелей и изгибные EI балок, тем быстрее численная сходимость модели КС.








