 2015-04-20
2015-04-20 752
752Алгоритм решения нелинейной системы уравнений основан на итеративном поиске, чувствительном к начальным значениям суммарного распора H (p+q). Это особенно касается безраспорных ВС.
Иногда итеративное решение может «разойтись» с истинным. Чтобы проконтролировать процесс (сходится / расходится), делается проверка: создается дополнительное нагружение произвольно приложенной на балке нагрузкой q = 0 тс/м. Если для этого нагружения H(q) ≠ 0, то модель «расходится».
Можно попробовать изменить жесткостные параметры элементов КС и подобрать «ключ итераций» (по умолчанию it = +5). Управление начальным значением распора выполняется ключом, заданным для каждого кабеля:
it = [+ – 0..9] H (p+q) = H (p) (1. + – it / 10), например:
если it = 1 H (p+q) = H (p) * (1. + 0.1);
если it = 9 H (p+q) = H (p) * (1. + 0.9).
Аналогично для балочно-вантовых систем контролируется начальное значение усилия N = N (p) + N (q) для каждой вантовой ветви.
7.3.1. Однопролетные висячие системы
Однопролетные ВС – симметричные и внешне распорные (рис. 7.13). {Ось симметрии x_sym = 0, масштабный коэффициент k_ord = 0 }.
Сочетания нагружений в виде 2 полос нагрузки А-12 вместе с тележками:
1) q = 2. тс/м по всему пролету (a = – 150 м, b = 150 м); F = 70. тс, x = 0. м
2) q = 2. тс/м на половине пролета (a = – 150 м, b = 0.); F = 70. тс, x = – 75. м
7.3.1.1. Рассмотрим простейшую систему с одним кабелем (рис. 7.13, а); файл 1-1.txt, i_syst = 1; key_i = 5.
Балка длиной d = L = 300 м состоит из одного участка (элемента), ее начало Xo = – 150 м, погонный собственный вес p_bal = 6 тс/м, EI = 2. * e6 тс м2 (ei_b = e6).
Два пилона высотой h = 50 м имеют один ярус ПП крепления (kz_pil = 0) и тип симметрии s = S. Их изгибная жесткость не участвует в расчете, задается формально: EI = 10.0 * 1.0 тс м2 (ei_p = 1.0); p_pil = 2. тс/м. Заделка в точке с координатой Xo = – 150, Yo = 10.
Левый АМ с координатой (Xo = – 200, Yo = 0.) и типом симметрии s = S.
Кабель имеет собственный вес g_cab = 0.8 тс/м с провисом fo = 30 м и воспринимает 100 % веса балки (доля b_cab = 1). Кабель компенсирован на этапе монтажа (kd = 0). EA = 1.2 * e6 тс (ea_k = e6); ki = i_syst = 1.
Прямолинейные оттяжки крепятся к АМ. Подвески общим числом no=19 несут балку по всей длине (e 1 = e2 = 0).
7.3.1.2. Упростим систему 7.3.1.1, закрепив однопролетный кабель на опорных сечениях балки (рис. 7.13, б); файл 1-2.txt. Образуется безраспорная ВС, в которой балка имеет предварительное обжатие продольной силой N = H. Пилоны и АМ здесь уже не требуются. Балка подкреплена по всей длине системой стоек. В сравнении с системой 7.3.1.1 при равных параметрах деформативность становится меньше за счет сжатия балки, особенно при несимметричном нагружении. Чтобы не «разошлось» итерационное решение: key_i = 0.
7.3.1.3. Изменим систему 7.3.1.1. Пусть балка делится на три участка
(d = 50 / 200 / 50 м), но подвешен только средний (e1=e2=2). Балку разделяют узлы интерфейса с кодом $ = ‘_‘. Кабель не имеет оттяжек и ПН крепится к пилону (kz_pil = 1). Концы пилона изгибаются внутрь пролета, так как оттяжки не ограничивают их перемещение. Жесткость пилона:
EI = 75. * e6 тс м2 (ei_p = e6); p_pil = 2. тс/м (рис. 7.13, в); файл 1-3.txt; key_i = 5.
|
|
|
|
|
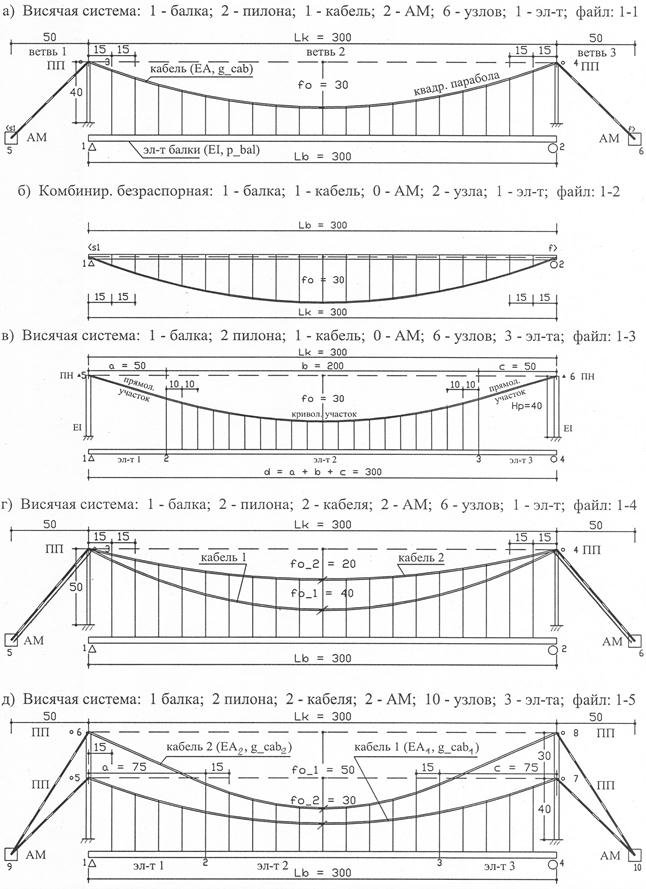
Рис. 7.13. Схемы однопролетных висячих мостов
7.3.1.4. «Двухкабельная верхняя система» (с развитым верхним поясом). Добавим к системе 7.3.1.1 второй кабель на 2-м этапе монтажа
(ki = 2). Оба кабеля крепятся к общим АМ и опираются на те же ПП опорные части пилона (рис. 7.13, г); файл 1-4.txt; key_i = 5.
Кабель 1 (fo = 40, EA = 1.0 * e6) за счет увеличенного провиса уменьшил передаваемый на АМ распор.
Кабель 2 (fo = 20, EA = 0.2 * e6) уже не несет балку (b_cab = 0) и не компенсирован (kd = 1); в '0' состоянии выгибает балку вверх за счет предварительного натяжения подвесками p_cab = 1.5 тс/м. Таким образом создается '–' стрела провиса для компенсации эксплуатационных нагрузок.
Для расчета 1-го этапа монтажа в табл. 1 ИД принимают i_syst = 1, а для расчета 2-го этапа – i_syst = 2.
7.3.1.5. Усложним систему 7.3.1.1 и добавим кабель 2 (рис. 7.13, д); файл 1-5.txt; key_i = 5. Балка делится на три участка (d = 75 / 150 / 75 м) двумя узлами интерфейса. На 0-м этапе сооружается пилон h = 50 м.
На 1-м этапе монтируется балка без проезжей части и обустройств, но с проектной жесткостью EI = 2.* e6. Одновременно пилон наращивается вторым ярусом h = 30 м. Этапность монтажа поясов:
· на 1-м этапе (i_syst = 1) кабель 1 (fo = 30, EA = 1.0 * e6) подвешен к нижнему ярусу пилона (ki = 1), воспринимает 80% веса балки (b_cab = 0.8), компенсирован (kd = 0). Подвески (no = 19) несут балку по всей длине (e1=e2=0);
· на 2-м этапе (i_syst = 2) кабель 2 (fo = 50, EA = 0.2 * e6) подвешен к верхнему ярусу пилона (ki = 2), воспринимает 20% веса балки (b_cab = 0.2), не компенсирован (kd = 1). Подвески (no = 11) несут только средний участок балки (e1=e2=2).
7.3.2. Двухпролетные висячие системы
Двухпролетные ВС используются реже, в основном как безраспорные. {Ось симметрии x _sym = 0, масштабный коэффициент k_ord = 1 }.
Сочетания нагружений в виде 4 полос А-12 вместе с тележками:
1) q = 4. тс/м по всем пролетам (a = – 300 м, b = 300 м); без тележек
2) q = 4. тс/м по левому пролету (a = – 300 м, b = 0.); F = 140. тс, x = – 150 м
7.3.2.1. Однокабельная ВС (рис. 7.14, а); файл 2-1.txt; key_i = 5.
Неразрезная балка состоит из 2 участков (d = 300 / 300 м), разделенных промежуточной опорой с кодом опирания $ = L; начало балки Xo =
= – 300 м, собственный вес p_bal = 12 тс/м, EI = 4. * e6 тс м2 (ei_b = e6).
Пилон высотой h = 70 м имеет один ярус ПП крепления (kz_pil = 0); формальная жесткость EI = 10. * 1. тс м2 (ei_p = 1.); p_pil = 2.5 тс/м. Заделка в точке с координатой Xo = 0., Yo = 10.
Левый АМ с координатой (Xo = – 300, Yo = 10.) и типом симметрии s = S.
Кабель крепится к АМ и свободно переходит через пилон, поэтому распор одинаков для обеих его ветвей.
|
|
|
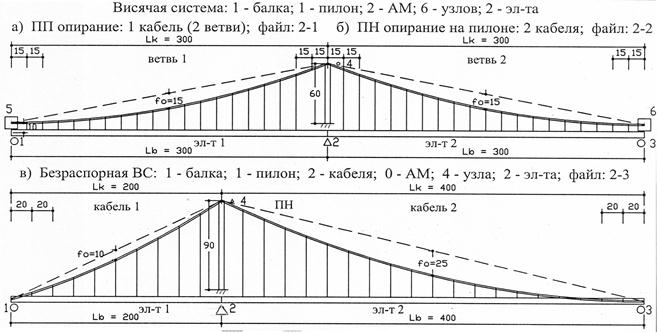
Рис. 7.14. Схемы двухпролетных висячих мостов
Кабель имеет собственный вес g_cab = 1.6 тс/м, fo = 15 и воспринимает 100 % веса балки (доля b_cab = 1). Кабель компенсирован на этапе монтажа (kd = 0). EA = 2.4 * e6 тс (ea_k = e6). Число подвесок no = 19 на ветвь.
7.3.2.2. Двухкабельная ВС (рис. 7.14, б); файл 2-2.txt; key_i = - 5. Оба кабеля монтируются за один этап.
Если в системе 7.3.2.1 изменить опирание пилона на ПН (kz_pil = 1), то будет 2 одноветвевых кабеля, работающих независимо, которые нужно описать в ИД:
1) fo = 15 м, EA = 2.4 * e6 тс, g_cab = 1.6 тс/м, b_cab = 1, no = 19
2) fo = 15 м, EA = 2.4 * e6 тс, g_cab = 1.6 тс/м, b_cab = 1, no = 19
Изгибная жесткость пилона EI = 500. * e6 тс м2 (ei_p = e6) включена в работу ВС и уменьшает прогибы балки. За счет отсутствия перетяжки кабеля на пилоне система стала жестче на 15 %, чем в 7.3.2.1.
7.3.3. Трехпролетные висячие системы
Трехпролетные ВС наиболее распространены, чаще как распорные. {Ось симметрии x_sym = 0, масштабный коэффициент k_ord = 1 }.
Сочетания нагружений в виде 6 полос А-12 вместе с тележками:
1) q = 5. тс/м по всем пролетам (a = – 500 м, b = 500 м); без тележек
2) q = 5. тс/м по среднему пролету (a = – 250 м, b = 250 м); F = 200. тс, x = 0. м
3) по боковым пролетам:
q = 5. тс/м по левому (a = – 500 м, b = – 250 м); F = 200. тс, x = – 375 м
q = 5. тс/м по правому (a = 250 м, b = 500 м); F = 200. тс, x = +375 м
7.3.3.1. «Классическая» однопоясная система с ПП опиранием на пилоне широко применялась в начале ХХ в. Верхний кабель из 3 ветвей передает распор на внешние АМ, а вертикальные реакции – на ПП опорные части пилонов. i_syst = 1 (рис. 7.15, а); файл 3-1.txt.
Неразрезная балка (L = 250 / 500 / 250 м) состоит из 3 участков, разделенных двумя промежуточными опорами (код $=L); начало балки Xo =
= – 500; число участков равно числу пролетов (нет узлов интерфейса); для всех участков одинаковые p_bal = 22 тс/м и EI = 20. * e6 тс м2 (ei_b = e6).
Два пилона высотой h = 70 м имеют один ярус ПП крепления (kz_pil = 0) и тип симметрии s = S. Их формальная жесткость EI = 100. * 1. тс м2 (ei_p = 1.0); p_pil = 8. тс/м. Заделка в точке с координатой Xo = – 250., Yo = 10.
Левый АМ с координатой (Xo = – 500, Yo = 30.) и типом симметрии s = S.
Кабель крепится к АМ и свободно переходит через пилоны, поэтому распор одинаков для всех его ветвей.
Кабель имеет собственный вес g_cab = 4.4 тс/м и воспринимает 100 % веса балки (доля b_cab = 1). Компенсирован на этапе монтажа (kd = 0).
EA = 6.5 * e6 тс (ea_k = e6); ki = i_syst = 1.
Провисы ветвей подобраны так (fo = 12.5 / 50 / 12.5 м), чтобы начальные распоры в них были одинаковыми. Шаг подвесок (панель) одинаковый для всех пролетов π = 25 м (no = 9 / 19 / 9 на ветвь).
Для всех ветвей подвески несут балку на полной длине (e1 = e2 = 0).
7.3.3.2. Если в системе 7.3.3.1 включить пилоны на восприятие распора (kz_pil = 1), то увеличится общая жесткость ВС. Вместо 1 кабеля будет
3 одноветвевых, которые фактически монтируются за один этап путем заглушки подвижных ОЧ. Такое решение нашло наибольшее распространение в современном мостостроении (рис. 7.15, б); файл 3-2.txt; key_i = 5.
Исключение перетяжки кабеля на пилонах приводит к самостоятельной работе оттяжек и их отдельному описанию:
- кабель 1 fo = 12.5, b_cab = 1, ki = i_syst = 1, no = 9 на каждую ветвь;
- кабель 2 fo = 50.0, b_cab = 1, ki = i_syst = 1, no = 19 на каждую ветвь;
- кабель 3 fo = 12.5, b_cab = 1, ki = i_syst = 1 no = 9 на каждую ветвь.
7.3.3.3. Двухкабельная однопоясная система повышенной жесткости (СПЖ) (рис. 7.15, в); файл 3-3.txt.
От «классической» системы отличается наличием узла интерфейса ($=‘_‘) в главном пролете, к которому крепится кабель: образуется '0' подвеска, которая исключает горизонтальные перемещения кабеля.
Левая и правая части этого кабеля работают независимо друг от друга. Поэтому в ИД модели следует описать два отдельных кабеля, которые монтируются за один этап (i_syst = 1):
- кабель 1 b_cab = 1, ki = i_syst = 1, no = 9 на каждую ветвь;
- кабель 2 b_cab = 1, ki = i_syst = 1, no = 9 на каждую ветвь.
Каждый кабель имеет симметричный профиль (fo = 12.5 / 12.5 м), подобранный так, чтобы исключить появление опорных реакций в '0' состоянии в узлах крепления кабеля к балке.
|
|
|
|
|
|
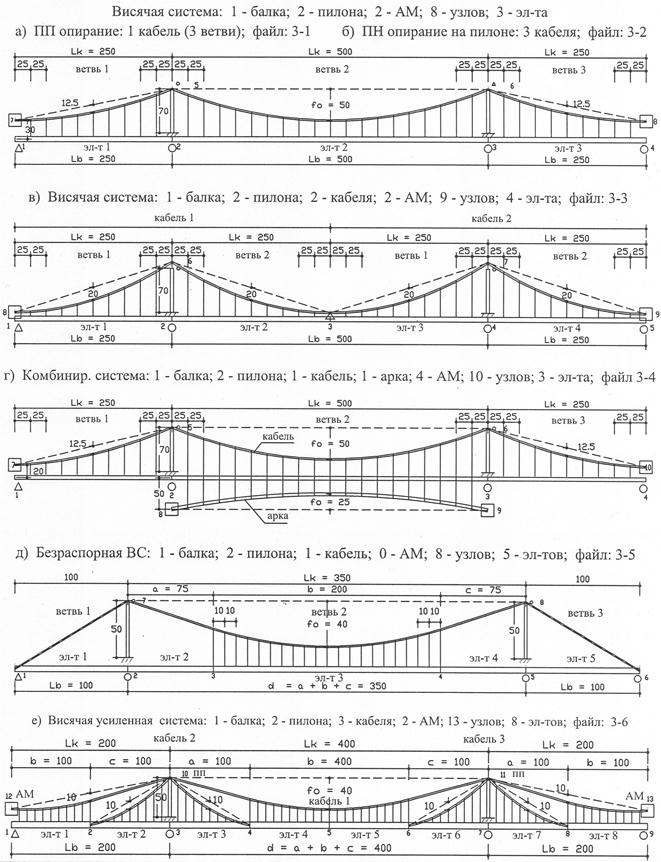
Рис. 7.15. Схемы трехпролетных висячих мостов
Оба кабеля компенсированы на этапе монтажа (kd = 0) и имеют жесткость EA = 6.5 * e6 и вес g_cab = 4.4 тс/м.
7.3.3.4. Двухпоясная ВС в разных уровнях. Система 7.3.3.1 дополняется нижней аркой, закрепленной на АМ; key_i=0 (рис. 7.15, г); файл 3-4.txt.
Система монтируется в два этапа (i_syst = 2):
- верхний пояс на 1-м этапе: ki = 1, b_cab = 1 / 0.8 / 1 kd_cab = 0
- нижний пояс на 2-м этапе: ki = 2, b_cab = 0.2 kd_cab = 0 кабель и арка не изгибают балку в '0' состоянии.
Распределение подвесок и материала в кабелях:
1) fo = 12.5/50/12.5 EA = 5.0 * e6, g_cab = 3.5 тс/м. Подвески (no = 9 / 19 / 9) крепятся к балке по всей длине.
2) fo = – 25 м; EA = 2.5 * e6, g_cab = 4.0 тс/м. Стойки (no = 19) несут только средний пролет балки.
Для опирания нижней арки требуются дополнительные АМ с координатой для левого (Xo = – 250, Yo = – 50) и типом симметрии s = S.
7.3.3.5. Безраспорная система с прямолинейными оттяжками, прикрепленными к концам балки (рис. 7.15, д); файл 3-5.txt.
Пролеты неразрезной балки (L = 100 / 350 / 100 м) разделены двумя промежуточными опорами ($ = L); Xo = – 275 м. Для выделения границы крепления подвесок средний пролет дополнительно делится на 3 участка (d = 100 / 150 / 100 м) с помощью узлов интерфейса ($ = '_'); поэтому число участков (5) балки больше числа пролетов (3).
Для участков балки изменяются:
- жесткость k = (1.0 / 0.8 / 0.7 / 0.8 / 1.0) относительно базовой EI = 42. * e6 тс м2;
- собственный вес k = (1.0 / 0.9 / 0.8 / 0.9 / 1.0) относительно базовой p_bal = 20 тс/м.
Неразрезная балка имеет укороченные боковые пролеты и большую жесткость, так как они сжаты распором кабеля и не поддерживаются подвесками. По этой же причине кабель имеет более подъемистую среднюю ветвь (fo = 0 / 40 / 0 м).
Оптимальным будет устройство такой комбинированной балочной части:
· боковые сжатые пролеты в виде сталежелезобетонных балок;
· средний пролет – из стальных конструкций коробчатого сечения.
Два пилона высотой h = 60 м имеют ПП крепление (kz_pil = 0) и тип симметрии s = S. Их формальная жесткость EI = 50. * 1. тс м2 (ei_p = 1.0); p_pil = 5.0 тс/м. Заделка в точке Xo = – 175., Yo = 10.
Вес кабеля g_cab = 3.8 тс/м; доля b_cab = 1; жесткость EA = 5.2 * e6 тс (ea_k = e6); ki = i_syst = 1. Кабель компенсирован (kd = 0).
Шаг подвесок p = 10 м (no = 0 / 21 / 0 на ветвь); балка подвешена только на средней панели (e1 = e2 = 3).
7.4. Примеры расчета балочно-вантовых мостов
Вантовые мосты чаще бывают безраспорными, когда ванты передают на балку горизонтальные усилия и создают продольное сжатие, максимальное в местах ПН опирания балок.
Примем следующее условие: за счет регулирования усилий в ‘0’ состоянии балка свободна от изгиба собственным весом. Предварительное напряжение балки создается обжатием ее участков монтажными или постоянными вантами.
7.4.1. Однопролетный вантовый мост
Рассмотрим простейший однопролетный вантовый мост. Это распорная система с растянуто-изогнутой балкой.
{ x_sym = 0, k_ord = 0 } (рис. 7.16, а); файл 4-1.txt; i_syst = 1.
|
|
|
|
|
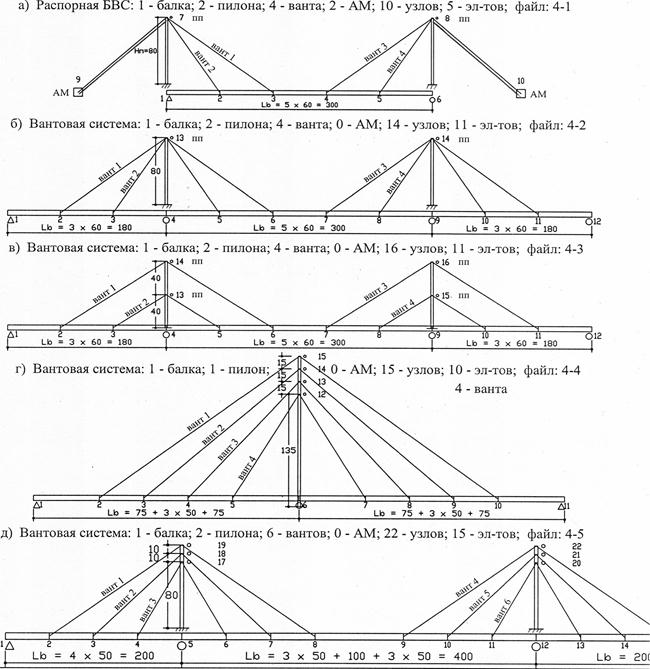
Рис. 7.16. Схемы балочно-вантовых мостов
Балка жесткости длиной L = 300 м состоит из 5 элементов; панель
d = 60 м; начало Xo = – 300 м; вес p_bal = 0. исключается по условию ‘0’ состояния; EI = 10 * e6 тс м2 (ei_b = e6).
Пилон высотой h = 80 м имеет один ярус ПН крепления (kz_pil = 1) и тип симметрии s = S. Его изгибная жесткость EI = 1 * e6 тс м2 (ei_p = e6); p_pil = 2. тс/м. Заделка в точке (Xo = – 150, Yo = 10).
Левый АМ с координатой (Xo = – 250, Yo = 0.) и типом симметрии s = S.
По пилону проходят 2 вантовые ветви (тип kz = 1), образующие радиально-лучевую систему. Для ограничения горизонтальных перемещений ветви крепятся к АМ. Осевая жесткость вант EA = 0.25 * e6 тс (ea_v = e6); начальное натяжение Sp = 0.
Сочетания нагружений в виде 4-х полос А-12 вместе с тележками:
1) q = 3.5 тс/м по всему пролету (a = - 150 м, b = 150 м); F = 135. тс, x = 0;
2) q = 3.5 тс/м на половине пролета (a = - 150 м, b = 0.); F = 135. тс, x = -75. м
7.4.2. Трехпролетная радиально-лучевая система
{ x_sym = 0, k_ord = 1 }; рис. 7.16, б; файл 4-2.txt; i_syst = 1.
Неразрезная балка (L = 180 / 300 / 180 м) состоит из 11 элементов
(d = 60 м); начало Xo = – 330 м; вес p_bal = 0. исключается по условию ‘0’ состояния. Жесткости балки, пилона и вант аналогичны п. 7.4.1.
Ванты крепятся в узлах балки и ПН опирания на пилоне (kz = 1): по две ветви на пилон. Образуется безраспорная БВС, в которой балка обжата на монтаже продольной силой.
Сочетания нагружений в виде 4 полос А-12 вместе с тележками:
1) q = 3.5 тс/м по всем пролетам (a = - 330 м, b = 330 м); F = 135. тс, x = 0.
2) по боковым пролетам:
q = 3.5 тс/м по левому (a = - 330 м, b = -150 м); F = 135. тс, x = -240 м
q = 3.5 тс/м по правому (a = 150 м, b = 330 м); F = 135. тс, x = 240 м
7.4.3. Трехпролетная система «арфа»
Трехпролетная система «арфа» отличается от системы трехпролетной радиально-лучевой системы двумя уровнями крепления вант к пилону и их ПП опиранием (kz = 0) (рис. 7.16, в); файл 4-3.txt.
7.4.4. Двухпролетная балочно-вантовая система
Двухпролетная БВС используются реже { x_sym = 0, k_ord = 1 }
(рис. 7.16, г); i_syst = 1.
Неразрезная балка (L = 300 / 300 м) состоит из 10 элементов (d = 50 / 75 м) с началом Xo = – 400 м; EI = 75 * e6 тс м2 (ei_b = e6).
Пилон высотой h = 180 м имеет 4 яруса ПН крепления вант (kz_pil=1); EI = 8. * e6 тс м2 (ei_p = e6); p_pil = 2.0 тс/м. Заделка в точке (Xo = 0. м,
Yo = – 10. м). Пилон включен в общую изгибную работу системы.
Симметричные вантовые ветви образуют систему «веер», EA = 2.2 * e5 тс (ea_v = e5), kz = 1.
Произведем выравнивание усилий в балке за счет предварительного натяжения вант, создающих в ней обратные по знаку моменты. Разделим нагрузку от веса пролетного строения (p_bal = 4.8 тс/м) на две части:
· p_deck = 3.6 тс / м – от веса балки жесткости;
· p_plate = 1.2 тс / м – от веса плиты проезжей части и дорожного покрытия.
На 1-м этапе найдем усилие предварительного натяжения вант N (reg) от веса p_deck и временной нагрузки q = 0, которое необходимо для компенсации прогибов балки (файл 4-4-1.txt).
На 2-м этапе найдем усилие в вантах N (q) от добавленного после монтажа балки веса p_plate и временной нагрузки А-12 по двум сочетаниям (файл 4-4-2.txt):
1) q = 3.5 по всем пролетам (a = - 300 м, b = 300 м); F = 135. тс, x = - 150, x = 150;
2) q = 3.5 по левому пролету (a = - 300 м, b = 0.); F = 135. тс, x = - 150 м
Суммарное рабочее усилие в вантах N = N (reg) + N (q).
7.4.5. Трехпролетная система «веер»
Трехпролетная система «веер» { x_sym = 0, k_ord = 1 } (рис. 7.16, д); файл 4-5.txt; i_syst = 1.
Неразрезная балка (L = 200 / 400 / 200 м) состоит из 15 элементов
(d = = 50 м); начало Xo = – 400 м; вес p_bal = 0 исключается по условию ‘0’ состояния; EI = 180 * e6 тс/м2 (ei_b = e6). Пролеты разделены двумя промежуточными опорами ($ = L), а места крепления вант выделены узлами интерфейса ($ = '_'). Балка обжата на монтаже продольной силой.
Рис. 7.17. Эпюры прогибов балки жесткости от сочетаний, мм
Рис. 7.18. Эпюры изгибающих моментов в балке жесткости от сочетаний, тс м
Пилон высотой h = 100 м имеет три яруса ПН крепления (kz_pil = 1) и тип симметрии s = S. Изгибная жесткость EI = 15. * e6 тс м2 (ei_p = e6); p_pil = 2. тс/м. Заделка в точке (Xo = – 200, Yo = 10).
По пилону проходят 3 вантовые ветви (тип kz = 1), образующие систему «веер». Осевая жесткость вант EA = 2.2 * e4 тс (ea_v = e4); начальное натяжение Sp = 0.
Сочетания нагружений в виде 4 полос А-12 вместе с тележками:
1) q = 3.6 тс/м по всем пролетам (a = - 400 м, b = 400 м); F = 135. тс, x = 0;
2) q = 3.6 тс/м на половине пролета (a = - 200 м, b = 200 м); F = 135. тс, x = 0.
На рис. 7.17, 7.18 показаны эпюры расчетов.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назовите особенности численного моделирования висячих мостов.
2. Перечислите типы регулирования усилий в элементах вантовых мостов.
3. Какие схемы нагружения характерны для многопролетных висячих мостов?
4. Какие схемы нагружения характерны для многопролетных вантовых мостов?
5. Какими возможностями обладает вычислительная программа «Интэл»?
ЗАКЛЮЧЕНИЕ
Учебное пособие включает в себя круг вопросов, связанных с проектированием висячих и вантовых мостов. При этом основное внимание уделено аналитическим расчетам этих сооружений. Данные о системах висячих и вантовых мостов, параметрах их проектирования, конструктивных решениях элементов (разд. 1) приведены с целью ознакомления студентов с основными положениями и техническими решениями, связанными с проектированием и строительством рассматриваемых сооружений. Эти данные, являясь отправными, не претендуют на полноту и не могут заменить литературу, специально посвященную этим вопросам [1, 3–6, 8].
В учебном пособии (разд. 2) рассмотрены также вопросы вариантного проектирования висячих и вантовых мостов. Изложены основные концепции вариантного проектирования, этапность формирования вариантов, а также особенности их технико-экономического сравнения в связи с индивидуальностью применяемых конструкций. Приведены аналитические выражения для определения расходов материалов по элементам и частям рассматриваемых вариантов.
В разд. 3, 4 достаточно подробно излагаются вопросы статического расчета висячих и вантовых систем.
Так, в разд. 3 рассматриваются теоретические обоснования линейных методов аналитического расчета одно- и трехпролетных распорных и безраспорных висячих мостов. Переход к приближенному учету геометрической нелинейности при определении внутренних усилий в элементах системы и прогибов предлагается осуществлять двумя способами.
Первый способ основан на применении корректирующих коэффициентов к усилиям и прогибам, полученным при расчетах по недеформированной схеме. Величины корректирующих коэффициентов приведены в графической и аналитической формах в зависимости от показателя деформативности висячей системы.
Второй способ основан на раздельном учете временной нагрузки при определении усилий и деформаций для кабеля и балки жесткости.
Аналитическому расчету вантовых мостов посвящен разд. 4. Отличие расчета вантовых мостов от висячих состоит в том, что в связи с большой жесткостью их допускается рассчитывать без учета геометрической нелинейности.
В связи с этим рассмотрены два этапа при определении усилий и деформаций в вантовых системах.
На первом этапе на основании использования упрощенных линий влияния приближенно определяются усилия в элементах вантовых систем различного вида, сечения элементов и их жесткостные характеристики.
На втором этапе с помощью методов строительной механики и с учетом установленных жесткостных характеристик уточняются значения усилий и деформаций вантовых систем.
В разд. 5 включены материалы по практическим расчетам несущих элементов висячих и вантовых мостов, выполняемых на стадии вариантного проектирования с целью определения размеров сечений и характеристик жесткости. Здесь рассмотрен подбор сечений кабеля, подвесок, вант, балок жесткости (металлических, сталежелезобетонных, железобетонных), пилонов (металлических, железобетонных).
Разд. 6 посвящен динамическому и аэродинамическому расчетам висячих и вантовых мостов.
Для оценки динамической устойчивости приведены выражения для определения частоты собственных колебаний (вертикальных, горизонтальных, крутильных) висячих и вантовых систем различного вида, а также отдельных их элементов, полученные разными авторами путем решения дифференциальных уравнений колебаний при помощи аналитических или численных методов. На основании вычисленных значений частоты колебаний дается оценка по периодам собственных колебаний с целью исключения резонансных явлений.
Приближенный расчет аэродинамической устойчивости представлен в виде определения критической скорости для пролетного строения висячей или вантовой системы, при которой возникает одно из аэроупругих явлений.
Для определения критической скорости рассмотрены два подхода.
Первый подход – теоретический, основанный на решении задач по разновидностям колебаний с учетом некоторых зависимостей, получаемых из экспериментов.
Второй подход – экспериментальный, основанный на использовании данных лабораторных испытаний в аэродинамической трубе.
Для висячих систем, кроме того, приведены критериальные оценки,
гарантирующие аэродинамическую устойчивость.
В этом же разделе изложены рекомендации по повышению динамической и аэродинамической устойчивости.
В разд. 7 дается характеристика универсальной программы «интэл» для определения с помощью ЭВМ напряженно-деформированного состояния комбинированных систем с учетом геометрической нелинейности. Программа основывается на непосредственном интегрировании дифференциального уравнения изгиба подкрепленных технических балок в форме метода граничных интегральных уравнений (МГИУ). Это позволило ограничить исходные данные параметрическим описанием и на порядок сократить их объем в сравнении с программами метода конечных разностей и метода конечного элемента, особенно для многопролетных и многокабельных висячих систем.
Таким образом, в учебном пособии в необходимой степени изложены основные способы линейного и деформационного методов аналитического расчета висячих и вантовых мостов на статические, динамические и аэродинамические воздействия, позволяющие на стадии вариантного проектирования объективно оценивать возможность и целесообразность предлагаемых решений.
ПРИЛОЖЕНИЕ 1
ДАННЫЕ О ВЕСЕ ПРОЕЗЖЕЙ ЧАСТИ
И ПОЛОТНА ПРОЕЗДА ВИСЯЧИХ И ВАНТОВЫХ МОСТОВ
ДЛЯ РАЗЛИЧНЫХ КОНСТРУКТИВНЫХ РЕШЕНИЙ
1. Стальные балки жесткости коробчатого или двутаврового сечения, раздельные или общего типа.
1.1. Конструкция проезжей (прохожей) части – стальная ортотропная плита (покровный лист, поперечные и продольные ребра, рис. 1).
Вес проезжей (прохожей) части  = 0,15…0,20 тс/м2.
= 0,15…0,20 тс/м2.
Рис. 1. Проезжая часть в виде ортотропного настила: 1 – балка жесткости; 2 – ортотропный настил; 3 – дорожное покрытие (одежда)
1.2. Конструкция проезжей части – железобетонная плита, объединенная или не объединенная с металлическими балками жесткости (рис. 2).
Вес проезжей части = 0,30…0,40 тс/м2.
Рис. 2. Проезжая часть в виде железобетонных плит: 1 – балки жесткости; 2 – железобетонные плиты;
3 – дорожная одежда; 4 – балочная клетка
1.3. Конструкция проезжей части – система продольных и поперечных балок (металлических), образующих балочную клетку, плюс полотно проезда или мостовое полотно (рис. 3).
Вес проезжей части (балочной клетки) определяется из условий:
· для автодорожных мостов,  = [0,05 + 0,01 (В – 6)] (тс/м2);
= [0,05 + 0,01 (В – 6)] (тс/м2);
· для железнодорожных мостов,  = 0,8 + 0,02 (d – 5) (тс/м),
= 0,8 + 0,02 (d – 5) (тс/м),
где В – расстояние между осями балок жесткости; d – величина панели.








