 2015-04-23
2015-04-23 4231
4231Для измерения параметров движения летательного аппарата относительно воздуха (индикаторной скорости, ИВС и числа М) применимы манометрический, термодинамический, тепловой, турбинный и ультразвуковой методы.
Путевая скорость летательного аппарата определяется с помощью следующих методов: методом решения навигационного треугольника скоростей, методом визирования земной поверхности, методом, основанным на эффекте Доплера, инерциальным методом.
Рассмотрим сущность некоторых из этих методов.
1. Манометрический метод [1]
Манометрический метод основан на измерении разности между полным и статическим давлением встречного потока воздуха (рП — рсТ) или отношения этих давлений (pП /pсТ)-
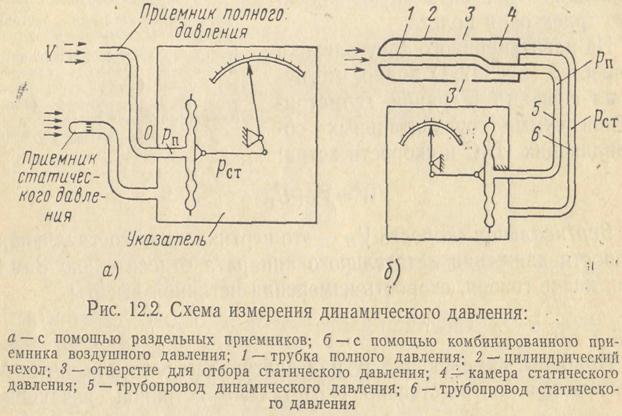
Давления рп и рст воспринимаются приемниками воздушного давления, расположенными снаружи летательного аппарата (рис. 12.2, а). Приемник полного давления представляет собой трубку, направленную открытым концом навстречу набегающему потоку воздуха, приемник статического давления рассмотрен ранее (см. § 11.4)..,'
Приемники полного и статического давления часто объединяют в комбинированный приемник воздушного давления (ПВД), схема включения которого приведена на рис. 12.2, б.
От приемников давления рП и рСТ передаются по трубопроводам дифференциальному манометру или датчику давления, которые воспринимают динамическое давление рДин=рП - рсТ и преобразуют его в перемещение отсчетного устройства или в электрический сигнал.
Манометр, измеряющий рдин, можно отградуировать в единицах индикаторной скорости Vi.
Манометрический метод позволяет также вычислить число М, являющееся функцией отношения давлений: М = f(pп /Pст). Если, кроме рп и рСТ, измеряется температура Т окружающей среды, то можно вычислить ИВС, являющуюся функцией отношения давлений и температуры:
 .
.
Вывод формул, устанавливающих зависимость величин Vi, M и V от измеряемых параметров (рп, рст и Т), приводится в § 12.3. Измерение давлений и вычисление величин Vi, V и М производится с помощью манометрических указателей и датчиков, которые рассматриваются более подробно в § 12. 4—12. 6.
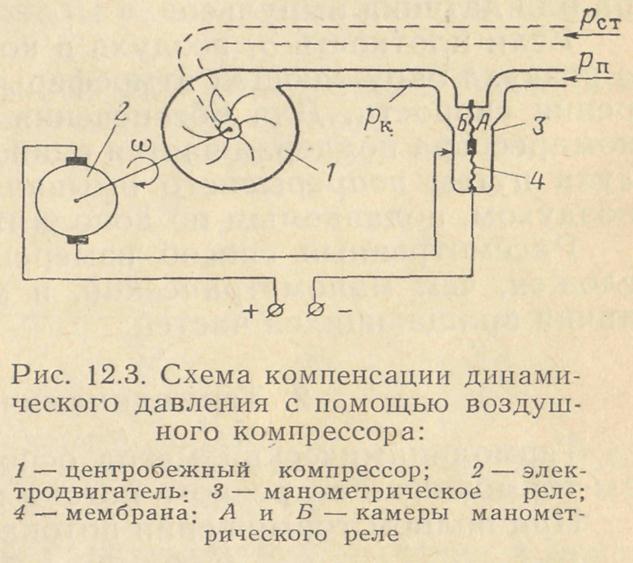
Определение ИВС возможно также по компенсационной схеме, основанной на автоматическом уравновешивании полного давления рп встречного потока воздуха давлением рк, развиваемым воздушным компрессором (рис. 12.3).
Полное давление рп от приемника воздушного давления подается в полость А дифференциального манометрического реле 3, в другую полость Б поступает давление рк от центробежного компрессора /, приводимого во вращение электродвигателем 2, управляемым от контактов манометрического реле. Входное отверстие компрессора сообщается со статическим давлением рот (см. пунктир на рис. 12.3).
Если Ра>рк, то мембрана 4 прогибается и замыкает цепь электродвигателя, который набирает обороты до тех пор, пока рк не увеличится до величины рп, после чего контакт размыкается, давление рк падает, контакт снова включается и т. д. Таким образом, поддерживается такая угловая скорость вращения компрессора, при которой рк=рп
Полное давление приблизительно (без учета сжимаемости воздуха) равно
 ,
,
а давление компрессора
 ,
,
где С — постоянный коэффициент.
Отсюда следует, что при равенстве рп = Рк и q1 = q угловая скорость  пропорциональна V. Преобразование в электрический сигнал может быть осуществлено с помощью тахогенератора или датчика импульсов.
пропорциональна V. Преобразование в электрический сигнал может быть осуществлено с помощью тахогенератора или датчика импульсов.
Если плотность Q1 воздуха в компрессоре не равна плотности g воздуха окружающей атмосферы, возникает погрешность измерения скорости. Для обеспечения равенства q1 = q температура компрессора поддерживается равной температуре наружного воздуха путем непрерывного омывания корпуса насоса наружным воздухом, подаваемым по дополнительной трубе.
Рассмотренный способ измерения ИВС в реализации более сложен, чем манометрический, и менее надежен вследствие наличия вращающихся частей.

