 2015-05-12
2015-05-12 2105
21051. Изображаем вал с всеми действующими на него силами, а также оси координат. (рис.16,б)
2. Определяем F 2 и F r2. Из условия равновесия тела, имеющего неподвижную ось:
 ;
;
 ;
;

3. Составляем шесть уравнений равновесия:
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
4. Решаем уравнения (1), (2), (3), (4) и определяем реакции опор:
Из (1): 
Из (2): 
Из (3): 
Из (4): 
5. проверяем правильность найденных реакций опор. Используем уравнение (5)

 , следовательно, реакции R AX и R BX определены верно.
, следовательно, реакции R AX и R BX определены верно.
Используем уравнение (6):

 , следовательно, реакции R AY и R BY определены верно.
, следовательно, реакции R AY и R BY определены верно.
Данную задачу можно решать другим методом: спроектировать тело со всеми действующими на него активными и реактивными силами на три координатные плоскости, чтобы проще было составлять уравнения равновесия.
Система параллельных сил
Пусть на твердое тело действуют две параллельные силы  и
и  , направленные в одну сторону (рис.17).
, направленные в одну сторону (рис.17).
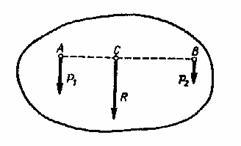
Рис.17
Равнодействующая  двух параллельных сил, направленных в одну сторону, параллельна этим силам и направлена в ту же сторону; модуль равнодействующей равен сумме модулей данных сил, а линия действия равнодействующей делит расстояние между точками приложения данных сил внутренним образом на части, обратно пропорциональные модулям этих сил, т.е.
двух параллельных сил, направленных в одну сторону, параллельна этим силам и направлена в ту же сторону; модуль равнодействующей равен сумме модулей данных сил, а линия действия равнодействующей делит расстояние между точками приложения данных сил внутренним образом на части, обратно пропорциональные модулям этих сил, т.е.
 ;
;  .
.
Используя известное свойство пропорции, можно получить
 .
.
Пусть теперь имеем две параллельные силы и , приложенные в точках  и
и  и направленные в противоположные стороны; такие силы называются антипараллельными (рис.18).
и направленные в противоположные стороны; такие силы называются антипараллельными (рис.18).
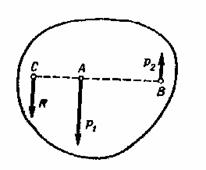
Рис.18
Предположим, что > . Равнодействующая двух антипараллельных сил параллельна этим силам и направлена в сторону большей силы; модуль равнодействующей равен разности модулей данных сил, а линия ее действия делит расстояние между точками приложения данных сил внешним образом на части, обратно пропорциональные модулям этих сил, т.е.
 ; и .
; и .
Как видно, в этом случае линия действия равнодействующей проходит через точку, лежащую вне отрезка  , и притом ближе к большей силе.
, и притом ближе к большей силе.
Рассмотрим систему параллельных сил  , приложенных в точках
, приложенных в точках  , приводящуюся к равнодействующей , приложенной в точке
, приводящуюся к равнодействующей , приложенной в точке  (рис.19).
(рис.19).
Рис.19
Положение центра параллельных сил определится его радиусом-вектором  относительно начала координат
относительно начала координат  или тремя координатами
или тремя координатами  . Положение точки приложения каждой силы
. Положение точки приложения каждой силы  определяется радиусом-вектором
определяется радиусом-вектором  или координатами
или координатами  .
.
Опуская выкладки, приведем формулу, определяющую радиус-вектор центра параллельных сил
 . (10)
. (10)
Спроектировав равенство (5) на оси координат, получим формулы для определения координат центра параллельных сил
 ;
;  ;
;  . (11)
. (11)
В формулах (11) координаты  и значения сил
и значения сил  являются алгебраическими величинами. Заметим, что выбор направления, вдоль которого параллельные силы считаются положительными, произволен и на результатах вычисления координат по формулам (11) не отражается.
являются алгебраическими величинами. Заметим, что выбор направления, вдоль которого параллельные силы считаются положительными, произволен и на результатах вычисления координат по формулам (11) не отражается.
Пусть даны параллельные силы  расположенные на плоскости
расположенные на плоскости  , и приложенные в точках
, и приложенные в точках  . Приведем силы к произвольному центру (рис.20). Получим в этом центре силу
. Приведем силы к произвольному центру (рис.20). Получим в этом центре силу  , равную главному вектору, и пару сил с моментом
, равную главному вектору, и пару сил с моментом  , равным главному моменту параллельных сил относительно центра приведения
, равным главному моменту параллельных сил относительно центра приведения
 ;
;  . (12)
. (12)
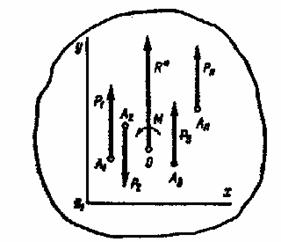
Рис.20
Для системы параллельных сил на плоскости имеем два условия равновесия
 и
и  . (13)
. (13)
Так как ось  направлена параллельно силам, то из (12) и (13) уравнения равновесия для данной системы сил можно выразить в виде двух уравнений
направлена параллельно силам, то из (12) и (13) уравнения равновесия для данной системы сил можно выразить в виде двух уравнений
 . (14)
. (14)
Уравнения (14) называются основными уравнениями равновесия параллельных сил на плоскости. Центр моментов для этой системы уравнений можно выбирать произвольно.
Для пространственной системы сил, параллельных, например, оси  , имеем три уравнения равновесия
, имеем три уравнения равновесия
 ;
;  .
.
Рассмотрим несколько примеров.
Пример 1. На тело действуют пять параллельных сил, имеющих модули  ,
,  и , приложенных соответственно в точках
и , приложенных соответственно в точках  ,
,  ,
,  ,
,  и
и  , причем первые четыре силы направлены в одну и ту же сторону, а последняя - в противоположную сторону. Найти координаты центра этой системы сил.
, причем первые четыре силы направлены в одну и ту же сторону, а последняя - в противоположную сторону. Найти координаты центра этой системы сил.
Решение. Полагая в формулах (14) для координат центра параллельных сил
 ,
,  ,
,  ,
,  ,
,  и
и 

 , получим
, получим
 .
.
Аналогично, найдем две другие координаты точки
 .
.
Пример 2. К горизонтальной балке, лежащей на двух опорах, приложены вертикальные силы  и
и  . Расстояния точек приложения этих сил от опор и расстояние между опорами указаны на рис.18. Определить реакции опор.
. Расстояния точек приложения этих сил от опор и расстояние между опорами указаны на рис.18. Определить реакции опор.
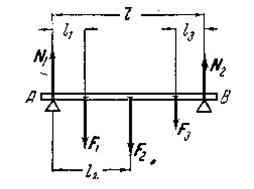
Рис.21
Решение. Обозначим реакции опор через  и
и  . Поскольку балка находится в равновесии, направив ось
. Поскольку балка находится в равновесии, направив ось  вертикально вверх, составим уравнения равновесия (9) для данной задачи
вертикально вверх, составим уравнения равновесия (9) для данной задачи
1) 

2) 

Из первого уравнения получим
 .
.
Подставив значение  во второе уравнение, найдем
во второе уравнение, найдем 
 .
.
Равновесие тел с учетом трения
Сопротивление, возникающее при скольжении одного тела по поверхности другого, называется трением скольжения.
Опыты показывают, что реакция  неподвижной поверхности образует с нормалью к этой поверхности некоторый угол
неподвижной поверхности образует с нормалью к этой поверхности некоторый угол  (рис.22), так что эту силу можно разложить на две составляющие: 1) силу
(рис.22), так что эту силу можно разложить на две составляющие: 1) силу  , направленную по нормали к опорной поверхности и называемую нормальной реакцией, и 2) силу
, направленную по нормали к опорной поверхности и называемую нормальной реакцией, и 2) силу  , лежащую в плоскости, касательной опорной поверхности, и противодействующую скольжению тела по этой поверхности. Эта сила называется силой трения скольжения.
, лежащую в плоскости, касательной опорной поверхности, и противодействующую скольжению тела по этой поверхности. Эта сила называется силой трения скольжения.
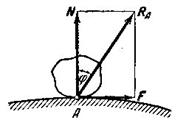
Рис.22
Модуль силы трения в покое может иметь любое значение, заключающееся между нулем и некоторым максимальным значением  , зависящим от условий опыта. Сила трения, проявляющаяся при покое тела, называется силой трения в покое или силой статического трения.
, зависящим от условий опыта. Сила трения, проявляющаяся при покое тела, называется силой трения в покое или силой статического трения.
На основании многочисленных опытов установлено, что максимальная величина силы трения в покое прямо пропорциональна нормальной реакции. Если перейти к равенству, получим
 , (15)
, (15)
где  - коэффициент пропорциональности, называемый статическим коэффициентом трения скольжения. Величина этого коэффициента зависит от материала трущихся тел, а также от состояния их поверхностей (степени шероховатости, влажности, температуры). Из (1) следует, что коэффициент трения скольжения есть число отвлеченное, т.е. не имеет размерности.
- коэффициент пропорциональности, называемый статическим коэффициентом трения скольжения. Величина этого коэффициента зависит от материала трущихся тел, а также от состояния их поверхностей (степени шероховатости, влажности, температуры). Из (1) следует, что коэффициент трения скольжения есть число отвлеченное, т.е. не имеет размерности.
При изучении трения твердых тел, кроме коэффициента трения, важную роль играет также угол трения. Пусть твердое тело покоится на неподвижной поверхности и есть равнодействующая сил и , т.е. полная реакция опорной поверхности в точке  (рис.23). Угол
(рис.23). Угол  между силой и нормалью к опорной поверхности называется углом трения.
между силой и нормалью к опорной поверхности называется углом трения.
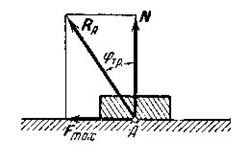
Рис.23
Из прямоугольного треугольника имеем
 ,
,
т.е. тангенс угла трения равен коэффициенту трения.
Геометрическое место прямых линий, проведенных из точки под углом к нормали  опорной поверхности в точке , образует коническую поверхность, которая называется конусом трения (рис.24).
опорной поверхности в точке , образует коническую поверхность, которая называется конусом трения (рис.24).
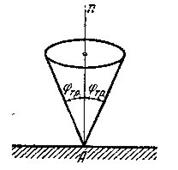
Рис.24
Заметим, что полная реакция опорной поверхности не может быть направлена по прямой, лежащей вне конуса трения.
Аналитический метод решения задач о равновесии твердого тела при наличии трения остается таким же, как и в тех случаях, когда трением пренебрегаем. Различие состоит лишь в том, что в уравнениях равновесия появляются, кроме нормальных реакций, силы трения.
Рассмотрим примеры решения задач.
Пример 1. Плоскость  может вращаться на шарнире
может вращаться на шарнире  , так что ее можно установить под любым углом
, так что ее можно установить под любым углом  к горизонту. На эту плоскость положено тело весом
к горизонту. На эту плоскость положено тело весом  (рис.25). При каком угле тело будет оставаться в равновесии?
(рис.25). При каком угле тело будет оставаться в равновесии?
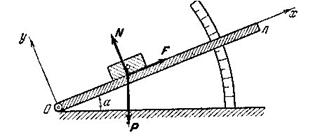
Рис.25
Решение. Обозначим через  нормальную реакцию плоскости и через
нормальную реакцию плоскости и через  силу трения. Составим два уравнения равновесия для сходящейся системы сил
силу трения. Составим два уравнения равновесия для сходящейся системы сил  , спроектировав их на оси
, спроектировав их на оси  и
и 
 ,
,  .
.
Из этих уравнений получим
 .
.
Наибольшее значение, которого может достигнуть сила трения в покое, равно
. Поэтому  , а следовательно
, а следовательно
 , или
, или  .
.
Так как  , то
, то  или
или  .
.
Отсюда заключаем, что тело будет оставаться в равновесии до тех пор, пока угол наклона плоскости не превышает угла трения.
Заметим, что при помощи прибора, изображенного на рис.25, можно определить коэффициент трения.
Пример 2. На рис. 26 показана схема колодочного тормоза. Найти наименьшее значение силы  , необходимое для того, чтобы затормозить шкив
, необходимое для того, чтобы затормозить шкив  . Коэффициент трения между тормозной колодкой и поверхностью шкива равен . Нужные размеры указаны на чертеже.
. Коэффициент трения между тормозной колодкой и поверхностью шкива равен . Нужные размеры указаны на чертеже.
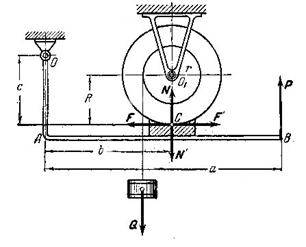
Рис.26
Решение. Приложенные к шкиву в точке  нормальное давление и силу трения обозначим через и . В той же точке к тормозной колодке приложены нормальная реакция
нормальное давление и силу трения обозначим через и . В той же точке к тормозной колодке приложены нормальная реакция  и сила трения
и сила трения  , равные по модулю и противоположные по направлению силам и . Напишем условия равновесия для шкива и для рычага
, равные по модулю и противоположные по направлению силам и . Напишем условия равновесия для шкива и для рычага  в отдельности, приравняв нулю сумму моментов всех сил, приложенных к шкиву, относительно точки и сумму моментов сил, приложенных к рычагу, относительно точки . Получим два уравнения
в отдельности, приравняв нулю сумму моментов всех сил, приложенных к шкиву, относительно точки и сумму моментов сил, приложенных к рычагу, относительно точки . Получим два уравнения
 ,
,  .
.
Положим  , где
, где  . Подставив это значение
. Подставив это значение  в эти уравнения и заменив
в эти уравнения и заменив  и
и  через
через  и , получим
и , получим
 .
.
Определив величину из первого уравнения и подставив ее значение во второе уравнение, найдем
 .
.
Как видно из формулы, с увеличением коэффициента  величина уменьшается и когда достигает наибольшего значения , сила будет иметь наименьшее значение. Следовательно, окончательно получим
величина уменьшается и когда достигает наибольшего значения , сила будет иметь наименьшее значение. Следовательно, окончательно получим
 .
.
Центр тяжести
Представим себе какое-нибудь твердое тело, находящееся близ поверхности Земли (рис.27). Силы притяжения отдельных частиц тела к Земле направлены приблизительно к центру Земли. Так как размеры рассматриваемых тел малы по сравнению с радиусом Земли, то эти силы можно считать параллельными. Центр этой системы параллельных сил называется центром тяжести данного тела, а равнодействующая этих сил  , проходящая через точку , представляет собой вес этого тела.
, проходящая через точку , представляет собой вес этого тела.
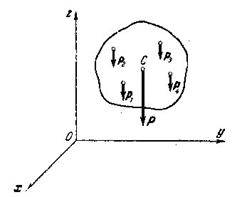
Рис.27
Так как центр тяжести тела есть центр параллельных сил, то для вычисления координат центра тяжести тела можно воспользоваться формулами, приведенными в предыдущем модуле
 ,
,  ,
,  (16)
(16)
где - координаты любой частицы твердого тела.
Заметим, что в (16) алгебраическими величинами являются только координаты точек, а значения всегда положительны, так как все силы направлены в одну сторону.
Обозначим объемы элементарных частиц через  , а вес единицы объема тела через
, а вес единицы объема тела через  . Если тело однородно, то получим
. Если тело однородно, то получим
 ,
,  ,……
,……
Подставив эти значения сил в формулы (2), будем иметь
 ,
,  ,
,  , (17)
, (17)
где  - объем всего тела.
- объем всего тела.
Для получения точных формул координат центра тяжести однородного тела, нужно в формулах (17) перейти к пределу, полагая, что число элементарных частиц неограниченно возрастает, а объем  каждой частицы стремится к нулю
каждой частицы стремится к нулю
 ,
,  ,
,  . (18)
. (18)
Если имеем однородное тело, имеющее форму тонкой пластинки, то его можно рассматривать как материальную плоскую фигуру, положение центра тяжести которой определяется двумя координатами  и
и  (рис.28).
(рис.28).
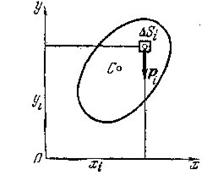
Рис.28
В этом случае вместо элементов объема нужно брать элементы площади  , а в знаменателе вместо
, а в знаменателе вместо  - площадь
- площадь  данной фигуры. Следовательно, для координат центра тяжести плоской фигуры будем иметь
данной фигуры. Следовательно, для координат центра тяжести плоской фигуры будем иметь
 ,
,  . (19)
. (19)
Аналогично, для координат центра тяжести однородной плоской материальной линии (например, тонкой проволоки, согнутой в виде плоской кривой), получим
 ,
,  , (20)
, (20)
где  - длина элементарной дуги данной линии, а
- длина элементарной дуги данной линии, а  - вся длина этой линии (рис.29).
- вся длина этой линии (рис.29).
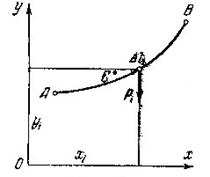
Рис.29
Следует отметить, что центр тяжести кривой линии вообще не лежит на этой линии. Вычисление пределов сумм, входящих в полученные формулы (18), (19) и (20), производится в общем случае методами интегрального исчисления; эти пределы выражаются определенными интегралами, распространенными соответственно на весь объем тела или на всю площадь фигуры или же взятыми вдоль данной линии. Однако, как увидим ниже, если тело имеет простую геометрическую форму, то положение его центра тяжести можно определить элементарным путем.
Приведем вспомогательную теорему для определения положения центра тяжести: если однородное тело имеет плоскость, или ось, или центр симметрии, то центр тяжести такого тела лежит соответственно в этой плоскости, на этой оси или в этом центре симметрии.
Теперь перейдем к определению положения центра тяжести плоской фигуры сложной формы. Пусть требуется определить положение центра тяжести плоской фигуры, состоящей из трех частей, положение центров тяжести которых известно (рис.30).
Рис.30
Положим, что площади частей фигуры соответственно равны  , а координаты их центров тяжести
, а координаты их центров тяжести  и
и  будут
будут  и
и  . Тогда координаты ее центра тяжести определятся формулами
. Тогда координаты ее центра тяжести определятся формулами
 ;
;  . (21)
. (21)
Этими формулами удобно пользоваться и при определении положения центра тяжести плоской фигуры, из которой вырезана некоторая часть (рис.31).
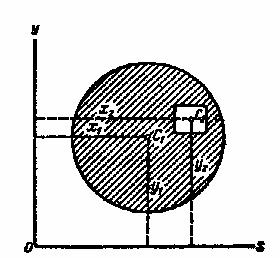
Рис.31
В этом случае координаты центра тяжести выражаются формулами
 ,
,  , (22)
, (22)
где  и
и  - площади соответственно всей фигуры и вырезанной из нее части, а
- площади соответственно всей фигуры и вырезанной из нее части, а  и
и  - координаты их центров тяжести.
- координаты их центров тяжести.
Этот способ определения центра тяжести плоской фигуры называется способом отрицательных площадей.
В заключении приведем формулы для определения положения центров тяжести некоторых фигур.
а) Центр тяжести площади треугольника
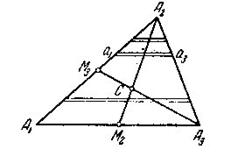
Рис.32
Центр тяжести площади треугольника совпадает с точкой пересечения его медиан  .
.
Если обозначить координаты вершин данного треугольника через (), (), (), то для координат и его центра тяжести получим
 ,
,  . (23)
. (23)
б) Центр тяжести дуги окружности (дуга )
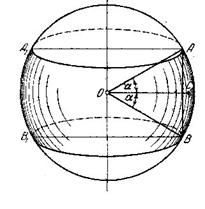
Рис.33
 (24)
(24)
где - половина центрального угла дуги , измеряемого в радианах.
в) Центр тяжести площади кругового сектора ( )
)
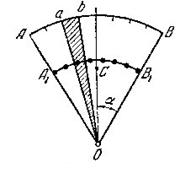
Рис.34
 (25)
(25)
Рассмотрим несколько примеров.
Пример 1. Найти центр тяжести фигуры, состоящей из полукруга радиуса  и прямоугольника со сторонами
и прямоугольника со сторонами  и
и  (рис. 35)
(рис. 35)
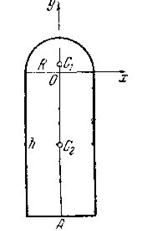
Рис.35
Решение. Возьмем начало координат в геометрическом центре полукруга и направим координатные оси, как указано на чертеже. Так как ось  является для данной фигуры осью симметрии то, согласно вышеприведенной теореме, искомый центр тяжести лежит на этой оси и, следовательно,
является для данной фигуры осью симметрии то, согласно вышеприведенной теореме, искомый центр тяжести лежит на этой оси и, следовательно,  . Остается найти . Разобъем фигуру на две части: полукруг и прямоугольник. Центры тяжести этих частей обозначим через
. Остается найти . Разобъем фигуру на две части: полукруг и прямоугольник. Центры тяжести этих частей обозначим через  и
и  . Точка лежит в середине отрезка
. Точка лежит в середине отрезка  . Точка находится от точки на расстоянии
. Точка находится от точки на расстоянии  , равном, согласно формуле (25),
, равном, согласно формуле (25),  . Тогда, согласно формулам (21), имеем
. Тогда, согласно формулам (21), имеем
Здесь и - площади полукруга и прямоугольника, а  и
и  - ординаты точек и . Следовательно,
- ординаты точек и . Следовательно,
 ;
;  ;
;  ;
;  .
.
Тогда, окончательно получим
 .
.
Пример 2. Определить положение центра тяжести фигуры, представляющей собой круг радиуса , из которого вырезан круг меньшего радиуса  , причем расстояние между центрами кругов
, причем расстояние между центрами кругов  (рис.36).
(рис.36).
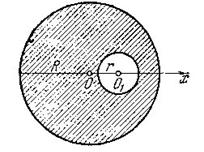
Рис.36
Решение. Искомый центр тяжести лежит на оси симметрии  , проходящей через центры кругов и
, проходящей через центры кругов и  ; начало координат возьмем в центре большого круга. Площадь первого круга
; начало координат возьмем в центре большого круга. Площадь первого круга  , центр тяжести которого совпадает с началом координат , т.е.
, центр тяжести которого совпадает с началом координат , т.е.  . Центр тяжести второго круга совпадает с точкой , абсцисса которой
. Центр тяжести второго круга совпадает с точкой , абсцисса которой  . Так как площадь маленького круга будет отниматься, то ее нужно брать со знаком минус, т.е.
. Так как площадь маленького круга будет отниматься, то ее нужно брать со знаком минус, т.е.  .
.
Абсцисса  искомого центра тяжести определяется по формуле (21)
искомого центра тяжести определяется по формуле (21)
 .
.
Окончательно получим
 .
.
Пример 3. Определить положение центра тяжести для тонкой однородной пластины, форма и размеры которой, в сантиметрах, показаны на рисунке 37.
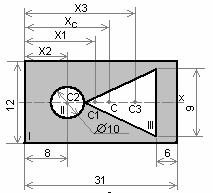
Рис.37
Указание. С целью упрощения решения следует стремиться разбить заданную сложную плоскую фигуру на возможно меньшее число простых частей, применяя в случае необходимости «метод отрицательных площадей».
Последовательность решения задачи:
1. изобразить на рисунке пластину и показать все ее размеры;
2. если не указаны заранее, указать на чертеже координатные оси;
3. разбить фигуру на возможно меньшее число простых фигур (треугольник, квадрат, круг, сегмент и т.д.);
4. вычислить площадь каждой части – простой фигуры, учитывая «метод отрицательных площадей» (если простая фигура вырезана из основной, то ее площадь считается отрицательной);
5. находим центр тяжести выделенных простых фигур по стандартным формулам (если имеется ось симметрии, то центр тяжести лежит на этой оси);
6. вычисляем координаты XC и YC центра тяжести плоской пластины.

