 2015-05-13
2015-05-13 849
849 .
.
Изображение регулируемого параметра определяется по формуле
 .
.
 |
Так как
 , то соответствующее выражение для
, то соответствующее выражение для  в изображениях по Лапласу запишется в виде
в изображениях по Лапласу запишется в виде  ,
,
где  - изображение по Лапласу
- изображение по Лапласу  .
.
Подставляя выражения  и
и  в формулу для , получим
в формулу для , получим
 .
.
Так как рассматривается переходный процесс при единичном ступенчатом входном воздействии, то  и изображение отклонения регулируемого параметра запишется в виде
и изображение отклонения регулируемого параметра запишется в виде
 .
.
Интеграл  можно представить в виде
можно представить в виде
 ,
,
так как  .
.
Из последнего равенства для следует
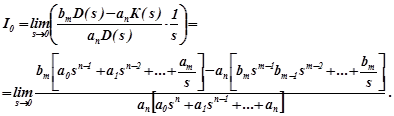
Вычислив данный предел, получим
 .
.
Пусть, исходя из минимума интегральной оценки, требуется два каких-нибудь параметра  и
и  САУ. Эти параметры входят в коэффициенты
САУ. Эти параметры входят в коэффициенты  и
и  . Для определения и , удовлетворяющих минимальному времени переходного процесса выражают в функции от и в явном виде, т. е.
. Для определения и , удовлетворяющих минимальному времени переходного процесса выражают в функции от и в явном виде, т. е.  . Затем вычисляют частные производные по и и приравнивают их нулю. В результате получают два уравнения
. Затем вычисляют частные производные по и и приравнивают их нулю. В результате получают два уравнения
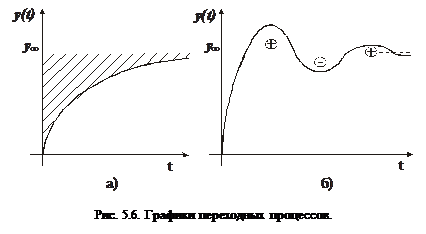
с двумя неизвестными и . Функция не всегда имеет экстремум по рассматриваемым параметрам. Тогда нужно выбирать их по наименьшему значению из области изменения и , назначаемой из других соображений. При выбранных таким образом параметрах может оказаться так, что система регулирования вначале удовлетворявшая заданному запасу устойчивости станет неудовлетворительной. Тогда уточняют значения и таким образом, чтобы система не оказалась слишком близкой к границе устойчивости. Также уточнения можно произвести построением диаграмм в плоскости двух параметров, полученных для различных  . Оценка качества переходного процесса и выбор параметров САУ по интегральной оценке применимы лишь при заведомо монотонных (без колебаний) процессах. Если имеет место колебательный переходный процесс (рис. 5.6,б), то при вычислении интеграла площади отклонений от идеального переходного процесса будут складываться алгебраически и наименьшему значению может соответствовать длительный колебательный процесс.
. Оценка качества переходного процесса и выбор параметров САУ по интегральной оценке применимы лишь при заведомо монотонных (без колебаний) процессах. Если имеет место колебательный переходный процесс (рис. 5.6,б), то при вычислении интеграла площади отклонений от идеального переходного процесса будут складываться алгебраически и наименьшему значению может соответствовать длительный колебательный процесс.
В этих случаях применяется квадратичная интегральная оценка
 . (5.5)
. (5.5)
Параметры САУ выбираются из условия обеспечения  . Для этого находится выражение, связывающее
. Для этого находится выражение, связывающее  с коэффициентами , . Например для систем с
с коэффициентами , . Например для систем с  это выражение имеет вид
это выражение имеет вид
 , (5.6)
, (5.6)
где
(5.7)
 (5.8)
(5.8)
Определители  в формуле (5.6) находятся по (5.7) путем замены
в формуле (5.6) находятся по (5.7) путем замены  - го столбца столбцом
- го столбца столбцом

В определителе (5.7) заменяются нулями все буквы с индексами меньше нуля и больше  , а в формуле (5.8) – с индексами меньше нуля и больше
, а в формуле (5.8) – с индексами меньше нуля и больше  . Выбор параметров САУ, исходя из обеспечения , может осуществляться аналогично удовлетворению условия
. Выбор параметров САУ, исходя из обеспечения , может осуществляться аналогично удовлетворению условия  .
.
 |
Как следует из (5.5), величина
 не зависит от знака отклонения
не зависит от знака отклонения  , а значит и от формы переходного процесса (монотонного или колебательного). Однако, как показали расчеты, если выбирать параметры САУ из условия минимума , то переходный процесс получается чрезмерно колебательным. Это связано с тем, что оценка учитывает только величину отклонения и время затухания и никак не учитывает скорость изменения
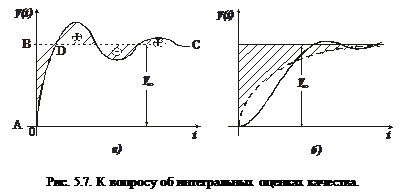
, а значит и от формы переходного процесса (монотонного или колебательного). Однако, как показали расчеты, если выбирать параметры САУ из условия минимума , то переходный процесс получается чрезмерно колебательным. Это связано с тем, что оценка учитывает только величину отклонения и время затухания и никак не учитывает скорость изменения  . Если, например, подать на вход системы единичный скачок, то ошибка в переходном процессе определится заштрихованной частью на рис. 5.7,а.
. Если, например, подать на вход системы единичный скачок, то ошибка в переходном процессе определится заштрихованной частью на рис. 5.7,а. Очевидно, что величина интегральной оценки (5.5) будет тем меньше, чем ближе будет кривая переходного процесса к ломаной линии АОВС. Но приближение процесса к этой линии требует увеличения угла наклона кривой к начальной стадии процесса (приближение части кривой ОD к отрезку ОВ). Увеличение же начальной скорости может вызвать значительное перерегулирование и, следовательно, малый запас устойчивости. Поэтому была введена другая, так называемая улучшенная квадратичная оценка
 , (5.9)
, (5.9)
где  - весовой коэффициент, равный некоторой постоянной времени. В этой интегральной оценке учтено влияние скорости на качество переходного процесса. Выбор параметров САУ по улучшенной квадратичной оценке
- весовой коэффициент, равный некоторой постоянной времени. В этой интегральной оценке учтено влияние скорости на качество переходного процесса. Выбор параметров САУ по улучшенной квадратичной оценке  приводит к менее колебательным процессам по сравнению с использованием квадратичной оценки .
приводит к менее колебательным процессам по сравнению с использованием квадратичной оценки .
Действительно, выражение (5.9) можно переписать в виде
 .
.
Так как  , то переходный процесс, соответствующий минимальному значению , будет при условии
, то переходный процесс, соответствующий минимальному значению , будет при условии
 ,
,
т. е. когда  . Данный процесс будет монотонным, нисходящим, с временем окончания, определяемым постоянной времени .
. Данный процесс будет монотонным, нисходящим, с временем окончания, определяемым постоянной времени .
Следовательно, выбирая параметры системы по минимуму улучшенной интегральной оценки (5.9), можно приблизить переходный процесс к экспоненте с постоянной времени , которая носит в этом случае название экстремали.
Для связи улучшенной интегральной оценки с коэффициентами уравнения , может быть использовано выражение
 ,
,
в котором первая составляющая правой части находится по формуле (5.6), а вторая составляющая может быть определена с учетом условия  . Тогда
. Тогда  рассчитывается по выражению (5.6) с тем отличием, что при определении
рассчитывается по выражению (5.6) с тем отличием, что при определении  и коэффициентов
и коэффициентов  будет учтено повышение степени на единицу, а
будет учтено повышение степени на единицу, а  - находится по той же формуле (5.7). Задавшись постоянной времени и обеспечив минимум интеграла по каким-либо параметрам системы и , находят искомые параметры САУ, при которых переходный процесс в ней будет близок к желаемому (см. рис. 5.7,б).
- находится по той же формуле (5.7). Задавшись постоянной времени и обеспечив минимум интеграла по каким-либо параметрам системы и , находят искомые параметры САУ, при которых переходный процесс в ней будет близок к желаемому (см. рис. 5.7,б).
Преимуществом интегральных оценок является то, что они дают единую числовую оценку качества переходного процесса. Недостаток состоит в том, что одному и тому же значению интегральной оценки могут соответствовать разные формы переходного процесса, что создает некоторую неопределенность при решении задачи выбора параметров САУ.
5.7. ТОЧНОСТЬ СИСТЕМ ПРИ ПОСТОЯННЫХ И МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗДЕЙСТВИЯХ
Точность САУ определяется величиной ошибки, равной разности между требуемым и действительным значениями регулируемого параметра. К точности САУ авиационных двигателей предъявляются особенно жесткие требования. Поэтому вопрос о точности САУ является одним из важных вопросов ТАУ. Рассмотрим от каких факторов зависит ошибка регулирования системы и каким образом можно уменьшить эту ошибку.
В общем случае ошибка регулирования складывается из ошибок регулирования по управляющему  и возмущающему
и возмущающему  воздействиям:
воздействиям:  . Рассмотрим ошибку регулирования , выводы по которой будут справедливы и для . При определении можно воспользоваться передаточной функцией САУ (рис. 3.8) по отклонению регулируемого параметра
. Рассмотрим ошибку регулирования , выводы по которой будут справедливы и для . При определении можно воспользоваться передаточной функцией САУ (рис. 3.8) по отклонению регулируемого параметра
 ,
,
где  - передаточные функции объекта регулирования и регулятора. Произведение
- передаточные функции объекта регулирования и регулятора. Произведение  представляет собой передаточную функцию САУ в разомкнутом состоянии:
представляет собой передаточную функцию САУ в разомкнутом состоянии:
 .
.
С учетом последнего равенства изображение ошибки регулирования САУ примет вид
 ,
,
где  - коэффициенты полинома
- коэффициенты полинома  .
.
Медленно меняющиеся процессы характеризуются плавным изменением возмущающего воздействия во времени или малой частотой вынужденных колебаний  . Тогда функцию
. Тогда функцию  можно разложить в ряд Тейлора в окрестности точки
можно разложить в ряд Тейлора в окрестности точки 

где  - коэффициенты ошибок.
- коэффициенты ошибок.
Коэффициенты ошибок могут быть определены также следующим образом
 .
.
Из этого равенства следует
 ;
;
 ;
;
 .
.
Окончательно изображение отклонения  можно представить в виде
можно представить в виде

Имея в виду, что  можно записать при нулевых начальных условиях выражение для оригинала
можно записать при нулевых начальных условиях выражение для оригинала  :
:

Из этого равенства следует, что ошибка регулирования зависит как от коэффициентов ошибок  , так и от величины и характера изменения возмущающего воздействия. Пусть на вход в САУ поступает возмущающее воздействие
, так и от величины и характера изменения возмущающего воздействия. Пусть на вход в САУ поступает возмущающее воздействие  . В этом случае ошибка регулирования при
. В этом случае ошибка регулирования при  равна
равна  или
или  . Ошибка регулирования, возникающая в САУ при действии постоянного возмущающего воздействия является статической ошибкой регулирования. Так как
. Ошибка регулирования, возникающая в САУ при действии постоянного возмущающего воздействия является статической ошибкой регулирования. Так как  - представляет собой коэффициент усиления разомкнутой САУ, то ошибка регулирования при прочих равных условиях тем меньше, чем больше коэффициент усиления . С другой стороны известно, что чем больше коэффициент усиления САУ, тем меньше запас ее устойчивости. Это можно показать, рассмотрев ошибку регулирования и устойчивость САУ с передаточными функциями объекта регулирования и регулятора
- представляет собой коэффициент усиления разомкнутой САУ, то ошибка регулирования при прочих равных условиях тем меньше, чем больше коэффициент усиления . С другой стороны известно, что чем больше коэффициент усиления САУ, тем меньше запас ее устойчивости. Это можно показать, рассмотрев ошибку регулирования и устойчивость САУ с передаточными функциями объекта регулирования и регулятора
 ;
;  .
.
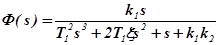
Тогда передаточная функция САУ по ошибке регулирования при возмущающем воздействии будет равна

Статическая ошибка регулирования определяется равенством
 , (5.10)
, (5.10)
где произведение  - представляет собой коэффициент усиления САУ в разомкнутом состоянии.
- представляет собой коэффициент усиления САУ в разомкнутом состоянии.
При положительных значениях коэффициентов собственного оператора

условием устойчивости САУ является неравенство
 или
или
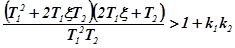 (5.11)
(5.11)
Из выражений (5.10) и (5.11) следует, что чем больше коэффициент усиления САУ  , тем меньше статическая ошибка регулирования и в то же время меньше запас устойчивости.
, тем меньше статическая ошибка регулирования и в то же время меньше запас устойчивости.
В САУ, содержащих в последовательной цепи регулятора интегрирующее звено, статическая ошибка регулирования не возникает. Такие САУ называются астатическими (см. раздел 1). Пусть в том же примере передаточная функция регулятора будет равна  . Тогда передаточная функция САУ по ошибке регулирования будет равна
. Тогда передаточная функция САУ по ошибке регулирования будет равна
 ,
,
и коэффициент ошибок при постоянных возмущениях  , следовательно статическая ошибка регулирования равна нулю. Однако астатические САУ обладают большой колебательностью и длительностью переходного процесса. Ошибка регулирования
, следовательно статическая ошибка регулирования равна нулю. Однако астатические САУ обладают большой колебательностью и длительностью переходного процесса. Ошибка регулирования  зависит не только от величины возмущения
зависит не только от величины возмущения  , но и от величины производной по времени от этого параметра. Пусть медленно меняющийся процесс задается уравнением
, но и от величины производной по времени от этого параметра. Пусть медленно меняющийся процесс задается уравнением
 .
.
В статических САУ ошибка регулирования при этом будет равна
 ,
,
т. е. определяется как самой величиной возмущающего воздействия, так и его производной.
В статических САУ, содержащих интегрирующее звено в прямой цепи регулятора и ошибка регулирования определяется лишь первой и высшими производными от , т. е.  . Такие САУ называются статическими САУ первого порядка.
. Такие САУ называются статическими САУ первого порядка.
Аналогичные рассуждения и выводы справедливы и при управляющем воздействии.








