 2015-07-04
2015-07-04 483
483Обратим внимание, что одна из двух линейных структур, показанных на рисунках 2 и 3, заведомо неустойчива (это структура 3), а другая структура (показанная на рисунке 2) может быть устойчивой и может быть неустойчивой в зависимости от знака коэффициента b. Однако, исходная система, получаемая в результате переключения с одной структуры на другую, является устойчивой. Отсюда ясно происхождение названия – «система с переменной структурой».
§5. Исследование динамики релейной системы управления объектом, имеющим передаточную функцию  .
.
Релейные системы управления объектом с такой передаточной функцией часто встречаются в задачах автоматизации производственных процессов.
Прежде чем переходить к исследованию динамики, выясним вопрос о том, в каком случае величина запаздывания в объекте считается большой, а в каком маленькой. Оценка величины запаздывания τ производится по соотношению запаздывания и постоянной времени. Мы говорим, что запаздывание достаточно велико, если  .
.
Приведем два примера релейных систем.
1. Упрощенные принципиальные схемы двух систем данного класса. 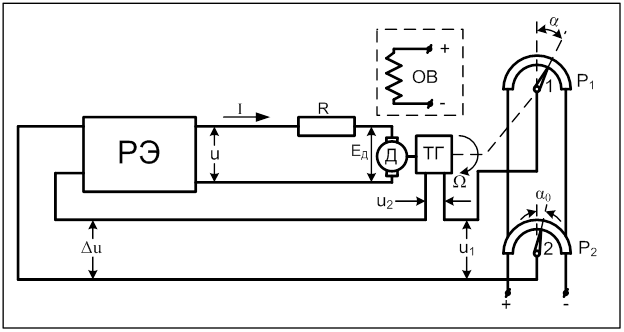
Рис. 1
На рисунке 1 показана релейная следящая система с двигателем постоянного тока. Угол поворота вала двигателя связан с напряжением на его якоре передаточной функцией
 (1)
(1)
Разность между заданным углом поворота вала и действительным углом его поворота определяется разностью напряжений двух идентичных потенциометров Р1 и Р2. Поворот стрелки потенциометра Р2 задает входной сигнал, а поворот стрелки потенциометра Р1 (измерительного потенциометра) показывает действительный угол поворота рабочего вала. Сигнал рассогласования поступает на вход релейного усилителя, сигнал с выхода релейного усилителя поступает на якорь двигателя Д. На валу двигателя находится тахогенератор (ТГ). Напряжение на выходе тахогенератора пропорционально скорости вращения вала Ω, которое является, естественно, производной от угла поворота.
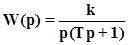
В качестве второго примера рассмотрим систему стабилизации температуры в газовой печи, показанную на рисунке 2. система работает следующим образом. Для изменения подачи управляющего воздействия - газа используется задвижка 2. Для измерения температуры печи применяется мостовая схема, содержащая терморезистор Rθ., сопротивление которого меняется в зависимости от температуры.
Рис. 2
Мостовая схема настраивается таким образом (положением точки 5), что при заданной температуре в камере печи мост сбалансирован, и контакты α и β разомкнуты. Двигатель постоянного тока Д неподвижен. При изменении температуры в камере печи мост разбалансируется. Управляющая цепь реле П замкнет или контакты α, или контакты β. Если замкнут какой-нибудь из контактов (α или β), то двигатель придёт в движение, при этом направление вращения по часовой стрелке или против зависит от того, какие контакты α или β замкнуты. Если температура в печи возросла, то двигатель Д, естественно, начнет закрывать задвижку. Если температура упала – открывать. Передаточная функция печи, где входное воздействие – количество поступающего газа в единицу времени, а выходной сигнал – температура внутри камеры, с достаточной для практики точностью описывается передаточной функцией:
 (2)
(2)
Постоянная времени печи настолько велика, что постоянными времени исполнительного двигателя Д можно пренебречь. Передаточную функцию, связывающую сигнал на входе двигателя Д и угол поворота вала задвижки (количество топлива, поступающего в единицу времени в печь), можно записать в виде интегрирующего звена:
 (3)
(3)
Для исследования динамики используем полученные путем масштабирования уравнения в простейшей форме.








