 2015-07-14
2015-07-14 9703
9703Характер относительного движения звеньев, допускаемого кинематической парой, зависит от формы звеньев в местахих контакта.
Совокупность возможных мест контакта образует на каждом из двух звеньев элемент кинематической пары. Элементом кинематической пары может быть точка, линия, поверхность.
Кинематические пары, элемент которых точка или линия, называются высшими; кинематические пары, элемент которых поверхность, называются низшими.
В зависимости от геометрии одного (или обоих) из соприкасающихся звеньев различаюткинематические пары сферические, конические, цилиндрические, плоскостные, винтовые.
По характеру допускаемого кинематической парой относительного движения звеньев различают вращательные (В), поступательные (П), вращательно-поступательные (В + П) и с винтовым движением ВП. Различие пар типа В + П и ВПзаключается в том, что в первых относительные движения (вращательное и поступательное) независимы, а во вторых одно движение не может быть осуществлено без другого.
Наряду с парами звеньев, соприкасающихся по одной поверхности, линии или точке, в практике применяют пары с многократным соприкосновением. Это или повторение элементов взаимодействия (шлицевые, многозаходные винтовые, зубчатые пары), или использование одновременного соприкосновения по поверхности и линии (сферическая пара со штифтом), по цилиндрической и плоской поверхностям (пара со скользящей шпонкой). Повторение соприкосновений звеньев характеризует эквивалентность пар различных видов. Пара с трехточечным контактом может быть эквивалентна плоскостной или сферической низшей паре по характеру движения звеньев.
Для твердого тела, свободно движущегося в пространстве, число степеней свободы (число независимых между собой возможных перемещений механической системы) равно шести: три поступательных вдоль осей Х, Y, Z и три вращательных вокруг этих осей (рис.2.1 ).
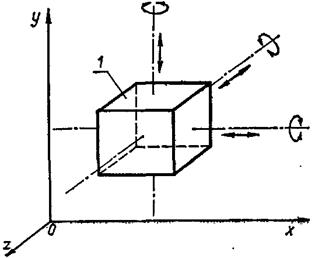
Рис.2.1
Для звеньев, входящих в кинематическую пару, число степеней свободы всегда меньше шести, так как условия соприкосновения (связей) уменьшают число возможных перемещений одного звена относительно другого: одно звено не может внедряться в другое и не может от него удаляться.
В общем случае каждая кинематическая пара накладывает на относительное движение звеньев S связей, допуская Н=6 – S относительных движений звеньев. В зависимости от числа наложенных связей S (оставшихся степеней свободы H) различают 5 классов кинематических пар. Такая классификация кинематических пар предложена И.И.Артоболевским (таблица 2.1)
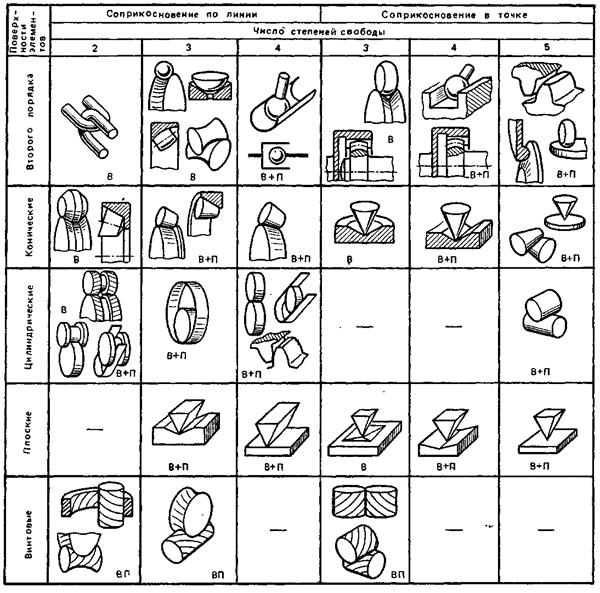
В таблицах 2.2-2.4 приведены примеры конструктивного выполнения кинематических пар. Приведенные в табл.2.2 и 2.4 пары классифицированы исходя из предположения, что трение и деформация звеньев отсутствуют. Трение позволяет использовать отдельные пары во фрикционных передачах. С учетом деформации пары с точечным контактом могут превращаться в пары с поверхностным соприкосновением.
Таблица 2.1
| Класс | Число связей S | Число степенй свободыH | Виды кинематических пар | ||
| Первый | Второй | Третий | |||
| I |  3В + 2П 3В + 2П | ||||
| II |  2 В + 2П 2 В + 2П |  3В + 1П 3В + 1П | |||
| III | 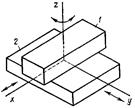 1В + 2П 1В + 2П | 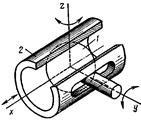 2В + 1П 2В + 1П | 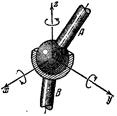 3В 3В | ||
| IV | 1 В 1 П; 2 В; 1 В 1 П | 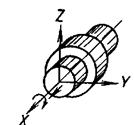 |  | 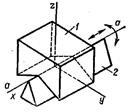 | |
| V | 1 В; 1 П; 1 П |  |  |  |
Таблица 2.2
Примеры конструктивного выполнения кинематических пар
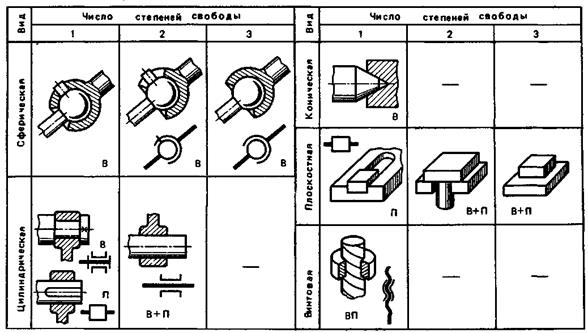
Таблица 2.3
Примеры конструктивного выполнения кинематических пар
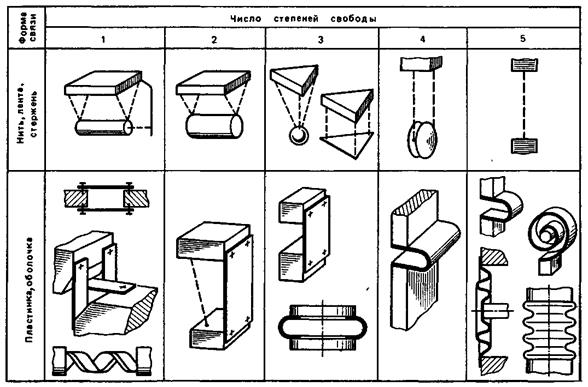
Таблица 2.4
Кинематические пары высшие
Свойства кинематических пар:
1.При прочих равных условиях низшие пары передают большие усилия, чем высшие. Однако, в низших парах имеет место трение скольжения, а в высших качения, при котором сопротивление движению меньше.
2. В механизмах с высшими парами легче обеспечить требуемый (сложный) закон движения звеньев (например, в кулачковых механизмах).
3. Низшие пары обладают свойством обратимости, т.е. вид траекторий относительного движения точек их звеньев одинаковый. Высшие пары этим свойством не обладают.
4. Для низших пар обычно применяется геометрическое замыкание, а для высших – силовое.
5. Точность высших кинематических пар определяется погрешностью
формы и расположенияих элементов; на точность низких пар в большей степени влияют зазоры в кинематических парах.
Вопросы для самоконтроля:
1. Назовите признаки классификации кинематических пар.
2. В чем различие между высшими и низшими кинематическими парами?
3. Как классифицируются кинематические пары по виду допускаемого относительного движения?
4. Чем определяется класс кинематической пары?
5. Почему возможно только 5 классов кинематических пар?
6. Приведите примеры кинематических пар каждого класса.
7. Кинематические пары каких классов могут быть реализованы в плоских механизмах?
8. В чем заключаются свойства кинематических пар?
9. Почему низшие пары, при прочих равных условиях, передают большие усилия чем высшие?








