 2015-07-14
2015-07-14 5082
5082Для барабанов, длинных деталей, если они имеют высокое число оборотов, необходима динамическая балансировка, при которой определяются и уменьшаются дисбалансы, характеризующие динамическую неуравновешенность ротора.
Задачей динамической балансировки является обращение оси вращения в главную центральную ось инерции. т.е. такую, при вращении около которой в детали не возникает не только центробежной силы, но и пары сил инерции, зависящей от центробежных моментов инерции ее масс, т.е.
 (9.5)
(9.5)
где l i - расстояние от i плоскости до плоскости приведения.
Динамическую балансировку производят на ходу, приводя вал в достаточно быстрое вращение, чтобы неуравновешенные центробежные силы и пары сил проявили себя в достаточной степени.
Устройство, определяющие дисбалансы на вращающемся роторе, называют станками для динамической балансировки. Принцип действия таких станков заключается в измерении (и, возможно, компенсации) либо опорных реакций вращающегося ротора, либо амплитуды и направлений колебаний его оси. Для этой цели ротор устанавливают на подвижную часть станка. Подвижная часть станка, характеризуемая так называемой паразитной массой, устанавливается на опорах, обеспечивающих определенное число степеней свободы для оси ротора.
Принцип действия таких станков различен. Рассмотрим, для примера, одну схему.
Этот станок работает по принципу использования следующего представления о неуравновешенности: неуравновешенность вращающейся детали - совокупность некоторой силы и пары сил, получающихся в результате приведения всех центробежных сил к некоторой точке 0 на оси детали.
Силы инерции вращающейся детали при равномерном ее вращении, приведенные к точке 0 на оси вращения (рис.9.4), дают главный вектор этих сил С, равный центробежной силе всей детали
и главный момент  , проекции которого на оси Х и У соответственно равны
, проекции которого на оси Х и У соответственно равны
где J zy, J xz - центробежные моменты инерции вращающейся детали относительно осей x и y
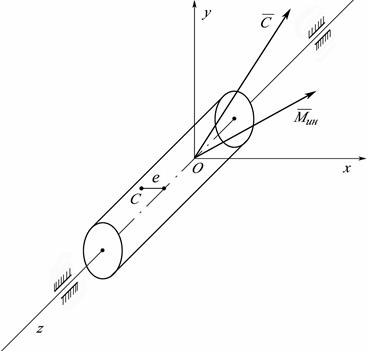
Рис.9.4
. Схема cтанка: Балансируемая деталь устанавливается в подшипниках на стойках рамы П ( рис.9.5 ).
Рама может колебаться поочередно относительно двух осей: SS - продольной (статической) и дд -поперечной (динамической). Пружины служат для предотвращения опрокидывания всей системы и поддержания колебаний в процессе балансировки.
Вначале включается ось дд и остается в качестве опорной ось SS. Балансируемая деталь приводится во вращение.
В результате действия центробежных сил вал вместе со стойками и рамой приходит в колебательное движение вокруг оси SS.
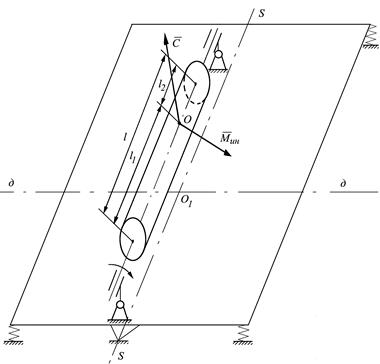
. Рис.9.5
Эти колебания компенсируются установкой временных противовесов G 1 и G 2 в торцовых плоскостях, поэтомуих центробежные силы будут удовлетворять условию
Однако, для того, чтобы эти противовесы не увеличивали момента первоначальной неуравновешенности М ин, выборих следует подчинить дополнительному условию:
При выполнении этих условий центробежные силы противовесов будут эквивалентны (статически) главному вектору ` С сил инерции, приведенных к т. 0, лежащей непосредственно над динамической осью дд колебаний рамы станка.
После постановки противовесов G 1 и G 2 остается неуравновешенной пара сил инерции М ин
Затем выключается ось SS т.е. вал получает возможность под влиянием пары М ин колебаться вокруг динамической оси дд.
Эти колебания компенсируют при помощи двух новых временных противовесов G' 1 и G' 2 , установленных в техже плоскостях, равных по величине и расположенных диаметрально противоположно относительно оси вращения детали.
Центробежные силы этих противовесов для отсутствия колебаний вокруг оси дд должны удовлетворять условиям:

Затем временные противовесы G' 1 и G 1 объединяют в один противовес G I с центробежной силой C 1 и статическим моментом, равным геометрической сумме статических моментов составляющих противовесов, для чего

Аналогично поступаюn и c противовесами G' 2 и G 2 в плоскости П

Существуют другие принципы, заложенные в конструкции станков.
На рис.9.6 а,г приведены схемы балансировочных станков с подвижной рамой 4, а на рис.9.6. в - с подвижной рамой 7.
Рама подвешена на пружине 5. На рис.9.6. б приведена схема балансировочного станока с подвижными опорами 6 самого ротора. Схема а характеризуется одной степенью свободы оси ротора, схема б — тремя, а схема в — шестью степенями свободы.
В зависимости от соотношения масс и жесткостей системы станок может быть дорезонансным, резонансным и зарезонансным. В первом - частота вращения ротора при балансировке ниже наименьшей собственной частоты колебаний системы, состоящей из ротора и паразитной массы, во втором — частота вращения ротора при балансировке равна собственной частоте колебаний системы, в третьем — частота вращения ротора при балансировке выше наибольшей собственной частоты системы.
Дисбаланс измеряют с помощью специальных приборов, принцип действия которых основан, например, на электромагнитной, механической или иной другой компенсации колебаний. В частности, колебания рамы 4 (сх. г) устраняют, перемещая диск с грузом 16 с помощью винтовой пары 17
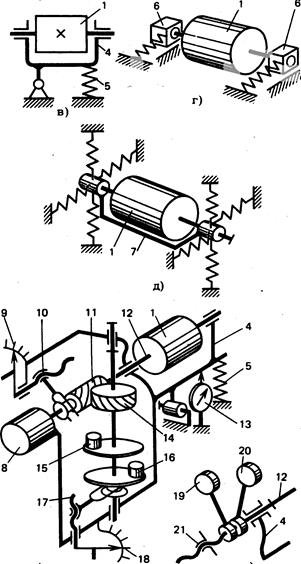
Г) д)
Рис. 9.6
. Грузы 15 и 16 приводятся во вращение от двигателя 8 через червяк 11 и червячное колесо 14. Передаточное отношение этой пары равно единице. От двигателя 8 через вал 12 приводится во вращение также ротор 1. Поскольку грузы находятся в противофазе и вращаются с частотой вращения такой же, как у ротора 1, то они создают компенсирующий момент, фиксируемый по шкале 18. Фаза момента регулируется перемещением червяка 11с помощью винтовой пары 10.
По шкалам 18 и 9 определяют величину корректирующей массы и ее положение. О колебаниях рамы судят с помощью прибора 13. Такое устройство используют в резонансных станках.
Более простое устройство — балансировочная головка (сх. д ) с самоустанавливающимися грузами 19 и 20. Грузы свободно установлены на валу ротора. При разгоне они зафиксированы гайкой 21. В зарезонансном режиме гайку отворачивают. Так как векторы силы и перемещения находятся в противофазе, то происходит уравновешивание с помощью грузов 19 и 20. Затем грузы снова фиксируют гайкой, останавливают станок и по их положению судят о величине и расположении корректирующей массы.
Высокую точность балансировки можно обеспечить используя лазерные
устройства [12], [13], [14]. Рассмотрим схему и принцип действия одного из
таких устройств [14].
Неуравновешенный ротор 3 (рис.9.7), установленный в подвесе 2, раз гоняют до частоты балансировки.
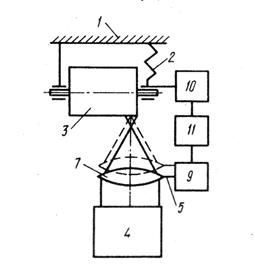
Рис.9.7
Вращаясь, он вызывает переменные нагрузки в подвесе 2, воспринимаемые измерителем 10 дисбаланса, преобразующим их в электрический сигнал, пропорциональный величине и углу дисбаланса, который усиливается усилителем 11 и передается на вибровозбудитель 9. Последний соединен с объективом 7 оптической системы 5, вызывая его колебания с частотой вращения ротора 3. Вибровозбудитель 9 подбирают из условия обеспечения смещения Δ F объектива от расфокусированного положения до сфокусированного подбором длины или жесткости пружины 8.
На рис.9.8 объектив 7 оптической системы 5 показан в исходном (среднем) положении, когда луч лазера 4 не сфокусирован на поверхности ротора 3. При наличии дисбаланса вибровозбудитель 9 осуществляет перемещение объектива 7 оптической системы 5, а следовательно и его фокуса 14, перпендикулярно поверхности ротора 3 так, что его фокус 14 в верхнем крайнем положении совмещается с поверхностью балансируемого ротора 3. Так как фокус 14 объектива 7 оптической системы 5 колеблется синфазно с вращением ротора 3, то в момент этого совмещения ротор 3 повернут к фокусу 14 "тяжелым" местом. Лазер включается в режиме непрерывной генерации импульсов, однако дисбаланс корректируется только при совмещенном положении.
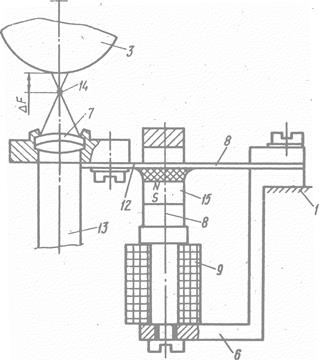
Рис.9.8
При уменьшении дисбаланса до минимального значения исчезают переменные нагрузки в подвесе 2, прекращаются колебания объектива 7, луч лазера 4 оказывается расфокусированным, и процесс балансировки прекращается.
Вопросы для самоконтроля:
1. Что является задачей динамической балансировки?
2. Как проверить нуждается ли ротор в динамической балансировке?
3. Как осуществляется динамическая балансировка?
4. Какое минимальное количество плоскостей исправления необходимо для выполнения динамической балансировки?
5. Для каких деталей необходима динамическая балансировка?

