 2015-08-21
2015-08-21 718
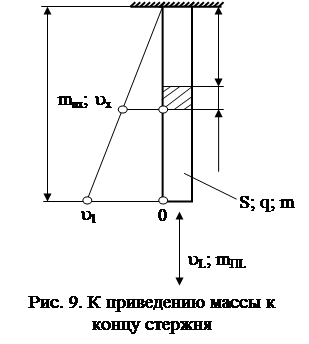
718Для решения задач динамики целесообразно представлять распределенные массы в виде сосредоточенных в заданной точке элемента. При этом должно выполняться сформулированное в п. 1.3 условие как равенство кинетических энергий приведенной (сосредоточенной) массы и всех элементарных масс, распределенных по длине действительного элемента.
Рассмотрим некоторые примеры приведения распределенных масс.
1.4.1. Стержень постоянного сечения (S=const)
Удлинение части стержня длиной x равно
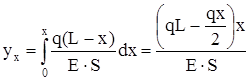 , (7)
, (7)
где q – погонный вес стержня;
E – модуль нормальной упругости;
S – площадь поперечного сечения.



 При
При  получим
получим
 . (8)
. (8)
Поскольку из формулы (8)
 , (9)
, (9)
можем записать:
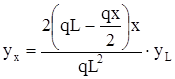 . (10)
. (10)
Скорость перемещения элемента стержня dx равна
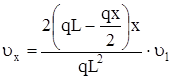 . (11)
. (11)
Кинетическая энергия элемента стержня длиной dx
 . (12)
. (12)
Кинетическая энергия всего стержня
 . (13)
. (13)
После интегрирования и преобразований получим
 . (14)
. (14)
При приведении распределенной массы стержня m к его концу приведенная кинетическая энергия равна
 . (15)
. (15)
Таким образом, при условии  получим
получим
 . (16)
. (16)
При приведении распределенной массы стержня m к сечению со скоростью ux
 . (17)
. (17)
Из условия  будем иметь для любого сечения стержня
будем иметь для любого сечения стержня
 . (18)
. (18)








