 2017-12-14
2017-12-14 858
858
Тип регулятора и закон управления (регулирования) выбирают в зависимости от технологических показателей, свойств ОУ, а также требований к качеству процесса регулирования.
Свойства объекта управления в первом приближении могут быть оценены по отношению времени запаздывания τ к постоянной времени объекта Т об: τ / Т об. Чем это отношение больше, тем задача автоматизации сложнее, и потому рекомендуют:
при τ / Т об < 0,2 – позиционный регулятор;
при 0,2 < τ / Т об < 1 – регулятор непрерывного действия;
при τ / Т об > 1 – импульсный или цифровой регулятор.
Так позиционные системы регулирования характеризуются автоколебаниями регулируемой величины, и если технология автоматизируемого процесса не допускает автоколебательного режима, то возможно применение регулятора непрерывного действия.
Одна из основных характеристик качества процесса регулирования – точность, оцениваемая значением статической ошибки, т.е. остаточным отклонением регулируемой величины от заданного значения по окончании переходного процесса.
В реальных системах статическая ошибка не должна выходить за пределы, допускаемые технологией автоматизируемого процесса.
Большинство остальных показателей качества характеризует работу системы в переходных режимах. Эти показатели могут быть разделены на две группы: определяемые непосредственно по кривой переходного процесса (динамическое отклонение,время регулирования, степень затухания) и косвенным показателям (степень устойчивость, степень колебательности, показатель колебательности). Эти показатели характеризуют один признак переходного процесса. Для общей оценки используют интегральные оценки (критерии) качества, учитывающие одновременно и максимальные отклонения регулируемой величины, и время регулирования: линейная интегральная оценка качества (используется для характеристики апериодических процессов регулирования) и квадратичная интегральная оценка качества (используют для характеристики колебательных процессов).
Характеры изменения выходной величины объекта при различных законах регулирования значительно отличаются. Для сравнения на рисунке показаны графики изменения y(t) при изменении нагрузки f(t) в момент времени to.
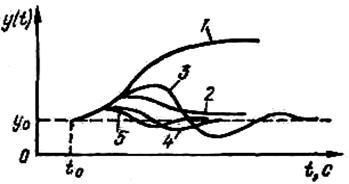
1 – без регулирования; 2 – с П-регулятором; 3 – с И-регулятором;
4 – с ПИ-регулятором; 5 – с ПИД-регулятором
Рисунок – График изменения выходной величины
Лекция 4








