 2017-12-14
2017-12-14 659
659Принцип разомкнутого управления заключается в том, что алгоритм управления строится только на основе алгоритма функционирования путем выбора законов (команды программы), определяющих действие управляющего устройства с учетом свойств управляемого объекта.
При управлении по разомкнутому циклу воздействие x(t), поступающее на управляющее устройство от задатчика, не является функцией результата этого воздействия на объект – оно задается оператором или командой программы. Определенному значению задающего воздействия x(t) будет соответствовать определенное текущее значение управляемой величины y(t), если возмущающее воздействие f(t) не изменяется во времени. В противном случае, когда возмущающее воздействие f(t) не остается постоянным, каждому новому значению возмущающего воздействия будут соответствовать различные значения управляемой величины y(t) при неизменном задающем воздействии x(t).
Такие САУ дают удовлетворительное качество управления лишь при высокой стабильности параметров САУ и внешней среды и при невысоких требованиях к точности.
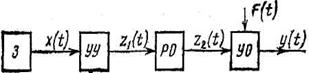

З – задатчик; УУ – управляющее устройство; РО – регулирующий орган; УО – управляемый объект; х(t) – задающее воздействие; z 1 (t) и z 2 (t) – внутренние воздействия;
f(t) – возмущающее воздействие; у(t) – управляемая (выходная) величина
Рисунок. 3.1 – Блок-схема автоматического управления по разомкнутому (а) и замкнутому (б) принципу








